Caricamento...

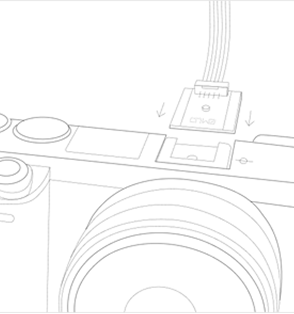
Modulo RTK GNSSper la mappatura UAV
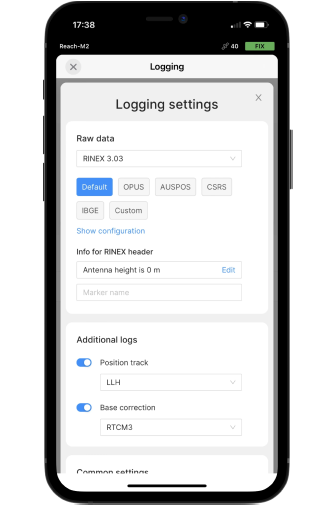
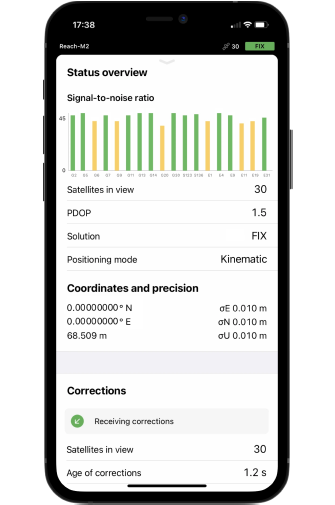
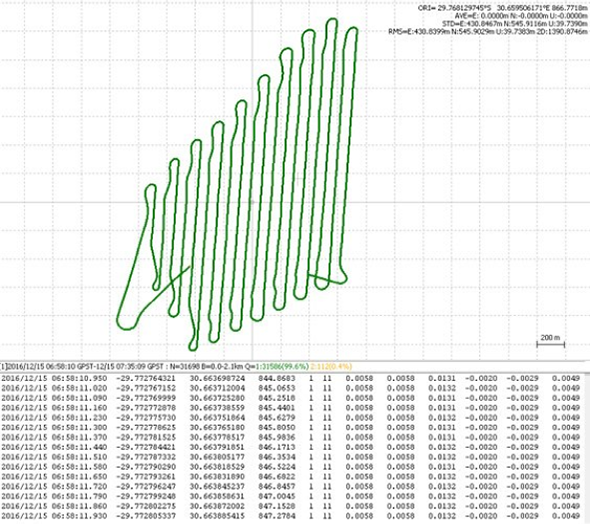
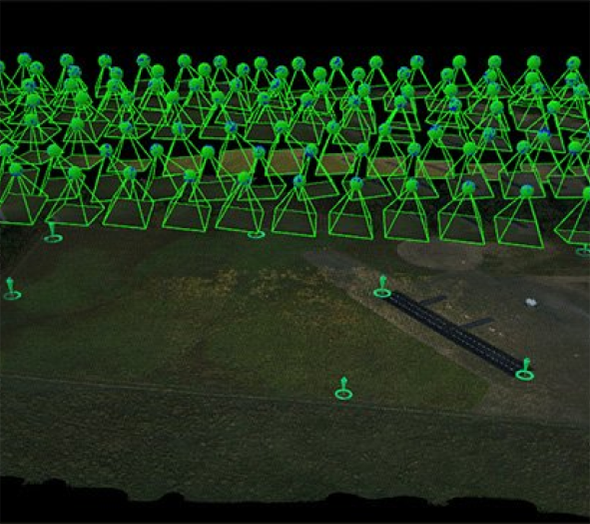
Posizionamento con precisione centimetrica in RTK e PPK
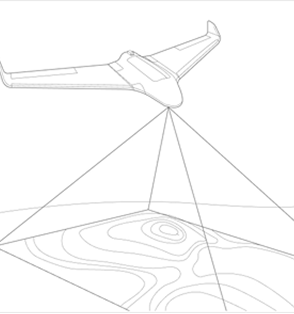
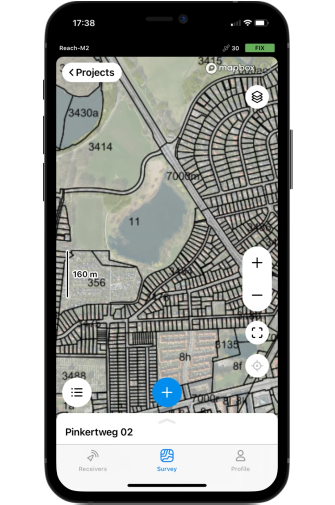
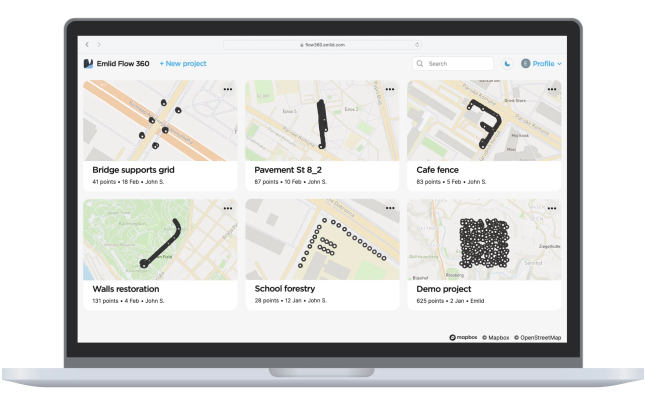
Mappatura UAV precisa con meno GCP
Multicostellazione
Multifrequenza
Baseline fino a 100 km in PPK
NTRIP o un altro Reach come stazione base
Per maggiori informazioni su Emlid Reach M2

MISURATORE LASER VERDE //
TILT //
RILIEVI DI PRECISIONE //
IMU //
MULTIFREQUENZA //
MULTICOSTELLAZIONE //
GNSS RTK //
RILIEVI TOPOGRAFICI //
FIX IN MENO DI 5 SECONDI //
1408 CANALI //