
Quando serve effettuare un PP nel posizionamento GNSS
Il post-processing GNSS diventa fondamentale quando servono precisioni elevate, controllo dei dati e maggiore affidabilità del risultato. L’articolo spiega quando conviene usarlo e in quali casi è davvero necessario rispetto al rilievo in tempo reale.
In questo articolo
- Caricamento indice…
Il posizionamento GNSS, come noto, può essere ottenuto sia con tecniche che richiedono un’elaborazione a posteriori, sia con tecniche real time che forniscono fin da subito, direttamente in campo e in tempo reale, la soluzione finale in termini di coordinate.
Sono tecniche particolarmente utili e usate in caso di rilievi cinematici e rilievi speditivi, laddove ci sia necessità di effettuare rilievi di una grande quantità di punti in tempi relativamente contenuti.
Questa distinzione, tra real time e post-processing, non va confusa con un altro tipo di classificazione che riguarda invece il tipo di soluzione. Distinguiamo una soluzione stand alone da una soluzione relativa.
Nel primo caso si tratta di una soluzione in cui si utilizzano le osservabili di un solo ricevitore, mentre nel secondo caso vi è almeno un rover e una base, e vengono effettuate delle cosiddette “differenze” di osservabili con l’obiettivo di mitigare o ridurre gli effetti dei disturbi che degradano la precisione del risultato finale.
Quindi da un lato abbiamo: soluzione direttamente in campo o soluzione a posteriori, dopo un’elaborazione.
Dall’altro lato: posizionamento assoluto o relativo.
La domanda che ci si pone in questo articolo è: quando ha senso dedicarsi a una post-elaborazione, che certamente richiede tempo e competenze e quindi va messa in conto solo nei casi in cui se ne trae un reale beneficio?
Gli errori che influenzano la precisione del posizionamento
Gli errori che hanno un impatto sulla qualità del posizionamento finale, quindi della soluzione, possono essere di diverso tipo. Possono essere spazialmente correlati o temporalmente correlati. Ancora, possono essere errori locali del tutto, o quasi, random.
Un rilievo in post-elaborazione ha innanzitutto senso quando si vuole mitigare o ridurre l’effetto di almeno alcuni di tali effetti nocivi.
Altro discorso è chiedersi se si vuole effettuare un posizionamento stand alone o una soluzione relativa o di rete. Ma la prima considerazione da fare è certamente quella citata.
|
Tipologia |
PP |
RT |
|
Stand alone |
Controllo di qualità |
Posizionamento navigazionale |
|
Relativo |
Monitoraggio, controllo, inquadramento |
Posizionamento di precisione speditivo |
In entrambi i casi si tratta di “processare” i dati grezzi in modo da minimizzare l’effetto negativo dei disturbi che affliggono il segnale satellitare grezzo.
Nel caso dell’approccio RTK, tale processamento avviene a bordo del ricevitore, con l’ausilio di una serie di modelli di errore e di osservabili di stazioni base che vengono inviati direttamente in campo in tempo reale.
Nel caso dell’approccio in PP, il processamento avviene a posteriori in ufficio, utilizzando modelli e dati di stazioni base che vengono raccolti successivamente dall’operatore. Ma concettualmente poco cambia.
In termini di risultati, poi, le differenze sono da un lato legate al metodo, dall’altro legate alla disponibilità di informazioni.
Da un punto di vista del metodo:
Il fatto di calcolare la soluzione in tempo reale fornisce il grande vantaggio di possedere tutte le informazioni necessarie a capire se il rilievo sia andato a buon fine direttamente in campo. Di contro, non vi è poi alcuna possibilità di rivedere l’elaborazione, eventualmente correggerla o ottimizzarla a posteriori. Le coordinate ottenute sono l’unico e il solo risultato disponibile.
Da un punto di vista della disponibilità di informazioni:
I dati che vengono trasmessi in tempo reale da infrastrutture di terra sono generalmente affidabili e controllati, ma non garantiscono il raggiungimento di accuratezze massime.
Infatti, per alcune tipologie di dati, modelli e correzioni, occorre attendere del tempo affinché siano disponibili nelle versioni che garantiscono maggiore accuratezza. Si pensi, ad esempio, alle effemeridi.
Quelle precise, che forniscono la massima precisione e accuratezza, sono disponibili solo due settimane dopo il giorno in cui il rilievo è stato effettuato. In questo senso, quindi, un approccio in post-processing consente di spingersi a precisioni e accuratezze più elevate.
Casi in cui è necessario effettuare PP
Un rilievo in post-elaborazione è quindi necessario quando ci si aspettano misure accurate e senza la presenza di outlier. Inoltre, è necessario quando ci si aspetta una maggiore autonomia nella scelta dei parametri di elaborazione stessa.
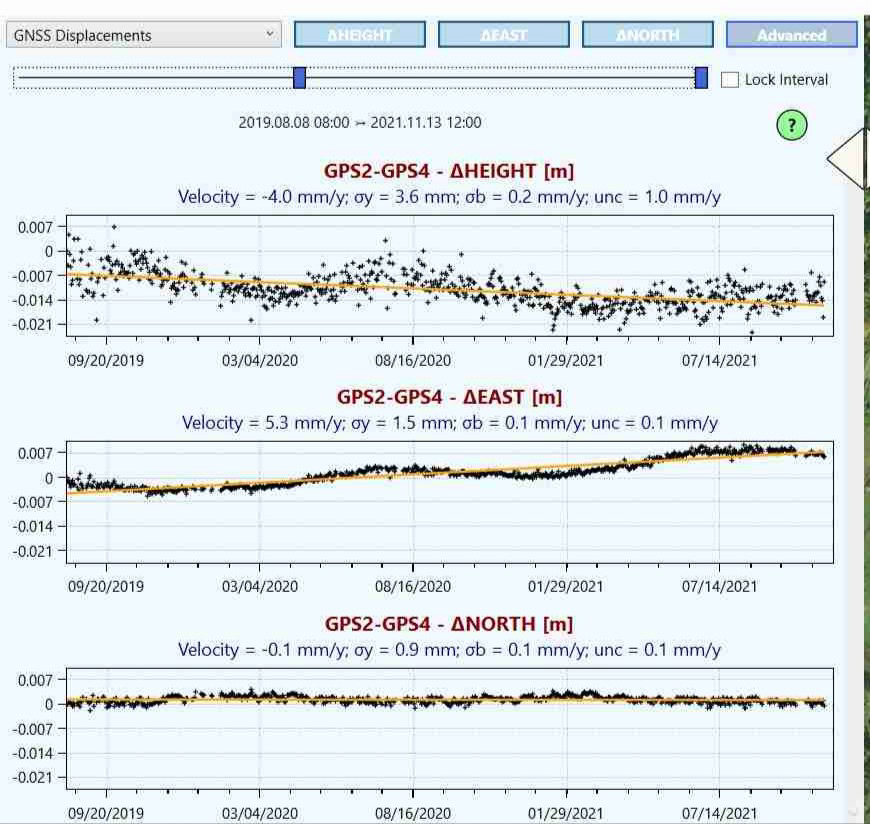
1. Monitoraggio spostamenti
L’utilizzo del GNSS per il monitoraggio degli spostamenti è sempre più diffuso, anche con strumentazione mass market.
Garantire grandi precisioni e accuratezze, per poter monitorare eventuali spostamenti anche dell’ordine di pochi millimetri all’anno, è un’applicazione sempre più utilizzata.
In questo caso la necessità di effettuare un post-processing è dovuta alle grandi precisioni e accuratezze ricercate e quindi, in qualche modo, anche al fatto che sono necessari dataset piuttosto lunghi nel tempo.
Per tali applicazioni solitamente si elaborano set di dati giornalieri, con acquisizioni a 30” di rate. È possibile anche ottenere soluzioni con intervalli più brevi, ma comunque si parla sempre di dataset di alcune ore.
Si calcola quindi una terna di coordinate ogni giorno, o per ogni intervallo di ore. A partire dalle serie storiche di coordinate così calcolate, si possono dedurre informazioni sullo stato di stabilità dei punti monitorati.
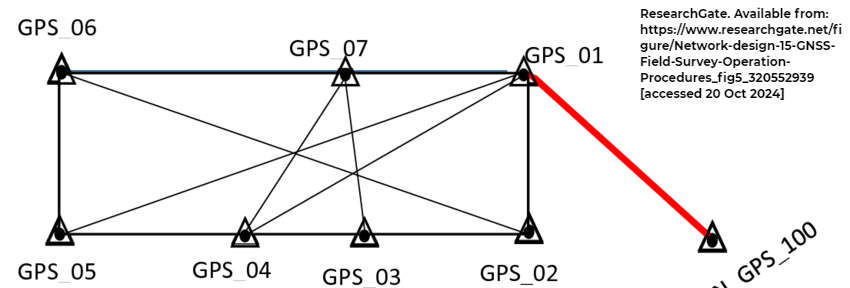
2. Reti di inquadramento
L’utilizzo dei ricevitori GNSS viene ampiamente impiegato per determinare coordinate di punti all’interno di reti topografiche cui appoggiare eventuali rilievi di dettaglio.
Quando occorre effettuare il rilievo della rete di inquadramento, cioè quella composta da una serie di punti che possano essere considerati fissi e da cui fare derivare successivi raffittimenti, si ha la necessità che tale rete sia materializzata con grande precisione e accuratezza.
In questo caso il motivo principale sta nel fatto che tutti i successivi raffittimenti e/o rilievi di dettaglio, a partire dall’accuratezza con cui si sono determinate le coordinate dei punti di inquadramento, introdurranno per forza un ulteriore degrado.
In questo caso, quindi, la rete di inquadramento viene realizzata spesso con un’acquisizione di osservabili GNSS sui vertici della rete, una post-elaborazione e una compensazione di rete.
Si può valutare, caso per caso, la durata delle sessioni di acquisizione, che evidentemente hanno un impatto sulla precisione e sull’accuratezza del posizionamento e sulla possibilità di avere un controllo sui risultati. Ma, in generale, si tratta di un caso in cui è vincolante realizzare un rilievo in post-elaborazione.
3. Mancanza di connessione dati
Molto più concretamente, senza individuare un caso specifico da un punto di vista dell’applicazione, l’approccio in post-processing si rende necessario quando non c’è possibilità di avere una connessione dati funzionante e stabile sul luogo del rilievo.
Anche quando l’applicazione in questione fosse del tutto adatta a un rilievo RTK, ad esempio tracciamento o inquadramento catastale, è chiaro che senza una connessione dati il posizionamento in real time non sia possibile.
In realtà, qui si dovrebbe aprire un capitolo sulla possibilità e opportunità di usare correzioni da satellite, ma nel complesso la possibilità di fare un’acquisizione di dati grezzi per una durata anche limitata, circa 10 minuti, resta un’opzione valida e sicura.
Certo, dipende molto dal numero di punti da rilevare. In ogni caso occorre avere presente che resta necessario avere disponibilità di osservabili da una base vicina.
Quindi, o è presente una stazione permanente che mette a disposizione i propri dati grezzi, oppure è necessario installare una propria base nei pressi dell’area di rilievo.
4. Stima degli errori
Un caso un po’ particolare riguarda poi la necessità di effettuare una stima degli errori che affliggono il segnale GNSS.
Come noto, gli errori che impattano sul segnale sono generalmente oggetto di modellazione o possono essere mitigati o eliminati mediante tecniche di processamento. Lo scopo è quindi quello di eliminarli per poter derivare una soluzione precisa e accurata in termini di posizione.
Più raro, ma accade, è il caso in cui invece è opportuno effettuare un post-processing per stimare il valore di un dato effetto di disturbo a partire dalle coordinate che sono note.
Si inverte in qualche modo il problema. Le coordinate del punto non sono più un’incognita, ma un dato. L’incognita diventa invece proprio uno o più degli effetti di disturbo.
In casi come questo diventa essenziale effettuare un posizionamento in post-elaborazione che consente, per durata e precisione delle stime, di derivare le informazioni mancanti.
È il caso, ad esempio, in cui si vuole stimare l’effetto di disturbo troposferico, che in alcuni casi è un dato utilizzato per calcolare il contenuto d’acqua in atmosfera, utile input anche per modelli previsionali e meteorologici.
Potrebbero interessarti...

FJD Trion P2: cosa cambia con il firmware V1.2.0
Il firmware V1.2.0 di FJD Trion P2 introduce nuove funzioni per migliorare scansione, gestione del rover, foto integrate, punti di controllo e rilievi estesi. L’articolo anali…
Leggi di più
FJDynamics Trion P2 vs V4E: quale SLAM scegliere? Analisi e test sul campo
Un confronto pratico tra FJD Trion P2 e FJD Trion V4E aiuta a capire quale SLAM scegliere in base al tipo di rilievo. L’articolo analizza prestazioni, indoor, outdoor, georefe…
Leggi di più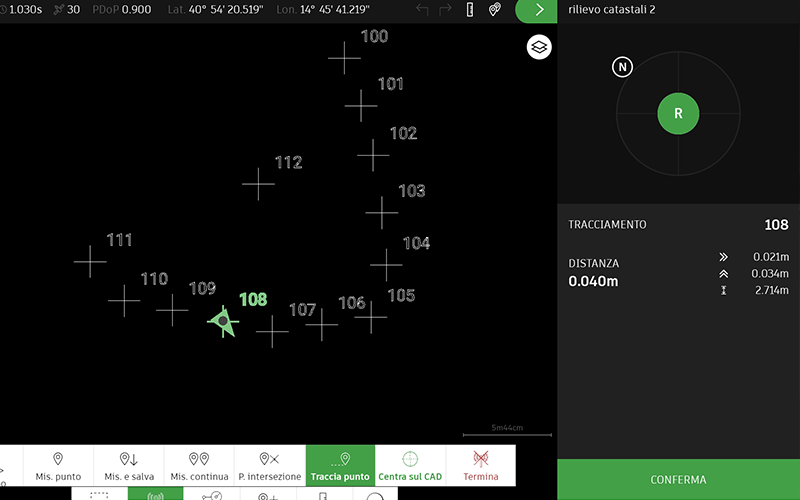
TPad: la topografia professionale a portata di smartphone
TPad trasforma uno smartphone Android in un sistema topografico da campo, collegabile a GNSS e strumenti Bluetooth. L’articolo mostra funzioni CAD, mappe, TILT, CoGo, Pregeo e…
Leggi di più