









Perché la sincronizzazione della fotocamera è così importante?
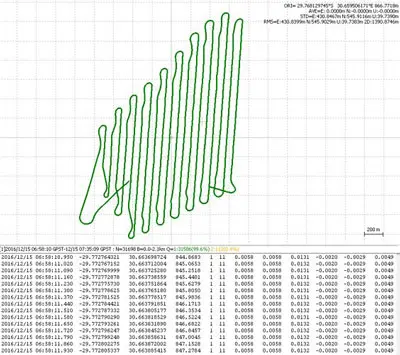
Di solito è il pilota automatico del drone che attiva la camera e registra le coordinate. Questo significa che se il drone sta volando a 20m/s e il GPS funziona a 5Hz, il pilota automatico registrerà la posizione solo ogni 4m. Se ciò è sufficiente per la navigazione, appare chiaro come non lo sia per chi deve effettuare georeferenziazioni precise. A ciò si aggiunga anche il ritardo tra il trigger e il momento effettivo in cui viene scattata la foto.
Reach risolve il problema?
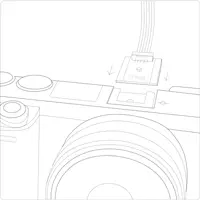
Reach risolve il problema del posizionamento collegandosi direttamente alla fotocamera, che a sua volta è sincronizzata con l'otturatore.Il tempo e le coordinate di ciascuna foto vengono registrati con una risoluzione inferiore a un microsecondo.Questo metodo consente di usare i GCP solo per verificarne l'accuratezza.