


















INDICE
Fotogrammetria e Laser Scanner Integrazione e Comparazione – Introduzione
La fotogrammetria, e in particolare l’implementazione di software di tipo Structure From Motion, ha subito un notevole incremento di applicazioni nell’ultimo decennio.
I motivi sono due: i sensori, sempre più economici e leggeri, e l’utilizzo dei cosiddetti droni, o meglio identificati come SAPR (Sistemi Aeromobili a Pilotaggio Remoto), sempre più affidabili e maggiormente di uso comune.
Nel recente passato, si è passato a un graduale aumento di applicazioni, anche nel mondo scientifico, di applicazioni fotogrammetriche (e aerofotogrammetriche) rispetto a quelle TLS (Terrestrial Laser Scanner).
In particolare, per la prima decade del nuovo millennio, la popolarità dei sensori LiDAR/TLS è notevolmente aumentata per la produzione di nuvole di punti; mentre la fotogrammetria, nella stessa decade, non è stata in grado di fornire algoritmi capaci di generare nuvole di punti simili a quelle ottenibili da sistemi attivi; per qualità e densità del dato.
Per questo motivo, molti ricercatori hanno spostato i propri interessi di ricerca su LiDAR e/o TLS, con conseguente ulteriore declino dei progressi nelle tecniche fotogrammetriche basate su immagini.
L’utilizzo dei sensori attivi
Le applicazioni di rilievo tridimensionale, nei primi anni del nuovo millennio, si basavano sull’utilizzo di sensori attivi; ovvero di dispositivi in grado di generare “un’immagine” tridimensionale dell’oggetto inquadrato, sfruttando le proprietà ottiche di un segnale luminoso opportunamente codificato. La luce codificata, a differenza della luce ambiente, è una luce che per contenuto informativo è facilmente riconoscibile da un sensore elettronico.
Viceversa, la fotogrammetria, e quindi l’utilizzo della tecnica passiva, rende misurabili le coordinate 3D di punti chiaramente identificabili nelle immagini, con variazioni di luminanza ben contrastate; laddove si debba misurare un oggetto senza una texture contrastata, come ad esempio una parete bianca, è imprescindibile l’ausilio di riferimenti esterni posizionati sulla scena (in linguaggio tecnico spesso chiamati target).
Structure From Motion
Con il diffondersi della tecnologia Structure from Motion, il metodo del rilievo fotogrammetrico ha finalmente ripreso vigore; lo SfM (in italiano: Struttura dal movimento) è una tecnica di range imaging derivante dalla Computer Vision, con cui è calcolato il processo di stima di strutture tridimensionali da sequenze di immagini bidimensionali.
I vantaggi e/o gli svantaggi delle tecniche di rilievo attivo (alta densità del dato e velocità di acquisizione) e passivo (qualità della texture e basso costo), hanno indotto il mondo scientifico a rilievi 3D, soprattutto in campo architettonico e archeologico, derivanti alla integrazioni delle due tecnologie.
L’intento di questo articolo è quello di considerare le due tecniche Fotogrammetria e Laser Scanner per ottenere un’ Integrazione e una Comparazione
Il caso di studio tratta dell’allineamento degli output derivanti da un sensore attivo (utilizzato per l’interno) e uno passivo (utilizzato per l’esterno), per il rilievo del Santuario SS.Cosma e Damiano ad Altavilla Irpina, (Avellino).
Il Rilievo 3d con TLS
Le scansioni all’interno del Santuario sono state realizzate con il laser scanner a differenza di fase un Faro Focus X130. Questo laser scanner è caratterizzato da un range di acquisizione tra 0.6 m e 130 m, con velocità di acquisizione massima di 976000 punti /sec, FOV (verticale/orizzontale) rispettivamente di 300/360°, con rumore stimato di 0,3 mm a 10 m (con @90% riflettanza), risoluzione verticale e orizzontale di 0,009° e in aggiunta la capacità di: registrazione immagini in High Dinamic Range, (HDR) a 3x/5x.

Infine, le dimensioni ridotte e il peso contenuto (<5 kg) di questo laser scanner, decisamente, consentono di trasportarlo agevolmente, anche in zone di difficile accesso.
La risoluzione di acquisizione delle scansioni è stata impostata per ottenere un punto ogni 3 mm a 10 metri di distanza con un passo angolare di 0.018°.
Per ottenere un modello numerico completo e per ridurre al minimo le zone d’ombra (ossia dove il dato metrico non viene acquisito); sono state realizzate quattordici scansioni, di cui 11 interne e tre esterne per rilevare completamente la facciata d’ingresso.
Il rilievo laser scanning consente di ottenere un insieme di coordinate tridimensionali dell’oggetto, in un sistema di riferimento correlato con lo strumento.
La misurazione GPS
Per georeferenziare tutte le scansioni nello stesso sistema di riferimento è stato realizzato un appoggio topografico; per semplificare la procedura, sono stati utilizzati dei punti materializzati a terra con dei target fotogrammetrici (dimensioni 60×60 cm) e misurati con GPS, sia per georeferenziare il modello 3D da laser scanner, sia per il modello aerofotogrammetrico.
Poi per semplificare la registrazioni tra le scansioni, durante le stazioni di presa laser scanner sono state posizionate alcune “sfere di riferimento”, grazie alle quali è possibile il riconoscimento automatico di sfere omologhe e quindi il collegamento e l’unione di diverse scansioni. Considerando che sono necessarie almeno tre sfere condivisibili da ogni stazione, l’intera area rilevata è stata ricoperta con oltre 20 sfere, posizionate a distanza variabile l’una dall’altra.

Nell’immagine che segue in rosso sono evidenziate le stazioni di presa, in giallo la collocazione delle sfere.
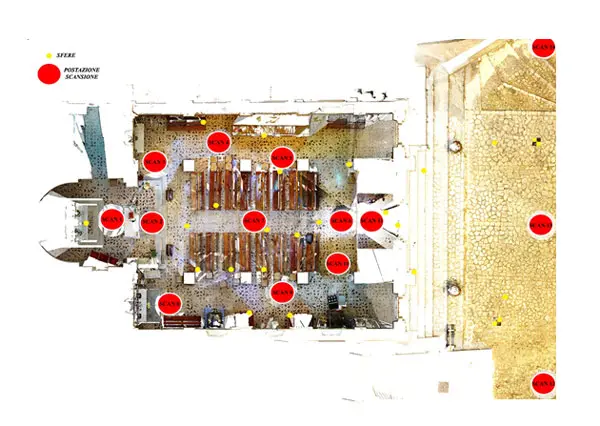
Stazioni laser scanner (in rosso) e target sferici (in giallo)
Rilievo 3D con Aerofotogrammetria
Il Sistema a Pilotaggio Remoto (SAPR) utilizzato è un DJI Phantom 4 Pro una camera integrata con un sensore CMOS da 1″ (12,8 x9,6 mm) da 20 Mpixel; focale equivalente di 24 mm, FOV (Field of View) 84,88°, Pixel Size di 2.4 µm.
L’acquisizione delle prese fotogrammetriche ha previsto la generazione di un piano di volo in DJI Ground Station per l’acquisizione delle sole immagini nadirali. Precisamente (per un totale di 50, altezza di volo 40 m dal piano di calpestio). Inoltre un’acquisizione in modalità di pilotaggio manuale per l’acquisizione delle prese fotogrammetriche oblique interne, con camera inclinata di circa 45° (per un totale di 120). L’acquisizione fotogrammetrica del piano di volo è stata effettuata mediante Waypoint (ovelap e sidelap del 70%) mentre quella manuale è stata eseguite mediante time – lapse con intervallo 2 secondi.
Il totale delle immagini processate e allineate è pari a 170.
Le immagini sono state processate in Agisoft PhotoScan (versione 1.4.2 build 6205).
Il workflow eseguito è stato: nella fase di Align Photos sono stati impostati i parametri: Accuracy = High, Key point limit = 40000, Tie point limit = 40000, ottenendo una Sparse Cloud di 526.880 punti, RMS error di 0,64 pixel.
Nella realizzazione della Dense Cloud i parametri utilizzati sono stati: Quality = High, Depth filtering = Disable, restituendo una Dense Cloud di 41.343.838 punti.
Poi nella Build Mesh i parametri impostati sono Surface Type: Arbitrary; Source Data: Dense Cloud; Face Count High, generando una Mesh con 2,756,228 triangoli.
Infine, nella Buld Texture i parametri impostati sono: Mapping Mode: Generic; Blending Mode: Mosaic; Texture size: 8192 x 8192 (attivando Enable hole fitting).
Dal completo processo fotogrammetrico, il GSD medio è pari a 8.3 mm, mentre l’altezza media di volo delle prese fotogrammetriche è pari a 32.6 m.
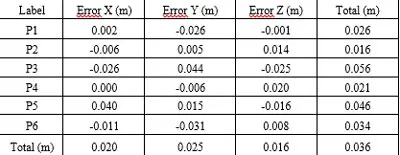
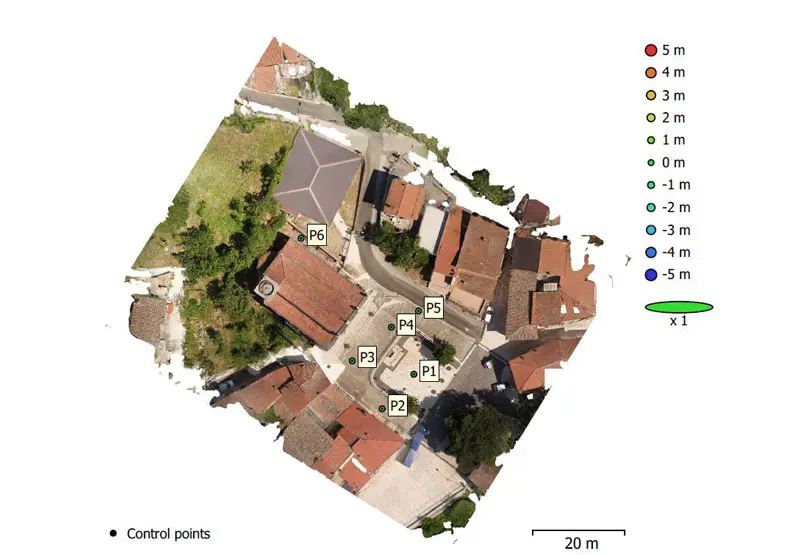
Il volo è stato georeferenziato mediante sei Ground Control Points (GCP), materializzati a terra mediante 6 target fotogrammetrici e chiodi topografici.
La posizione dei target è stata misurata con ricevitori GNSS nel sistema di riferimento cartografico UTM/ETRF00 con quote ellisssoidiche.
Mediante l’ottimizzazione metrica per mezzo dell’algoritmo di Bundle Adjustment, l’errore medio stimato mediante i 6 GCP è di circa 3,6 cm.
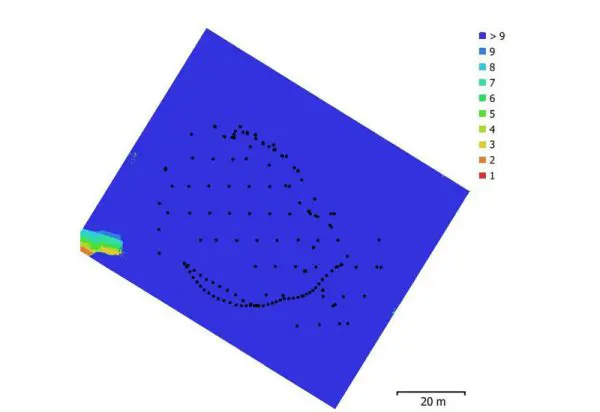
Di seguito, sono riportate le posizioni degli scatti fotogrammetrici
Nell’immagine successiva è riportata la disposizione spaziale dei GCP
Confronto tra le nuvole di punti
Per avere un’ulteriore stima della qualità metrica della nuvola generata da aerofotogrammetria, entrambe le nuvole (laser scanner e fotogrammetrica) sono state importare in ambienta CloudCompare.
Quest’ultimo è un software per la gestione delle nuvole di punti, estrazioni di profili, realizzazione di immagini raster, creazione di mesh e tante alte funzioni.
E’ un progetto open source nato originariamente, per eseguire il confronto tra nuvole di punti 3D, in ambito ingegneristico, nell’ambito della tesi di dottorato di Daniel Girardeau-Montaut.
Una volta esportate le nuvole TLS e aerofotogrammetrica, entrambe sono state importate nel software CloudCompare. Le nuvole di punti, nei propri ambienti di elaborazione; queste sono state precedentemente georeferenziate nel sistema di riferimento UTM/ETRF00 con quote ellissoidiche, e quindi poste nello stesso sistema di riferimento; mediante i GCP stimati per mezzo di tecniche GNSS in modalità RTK.
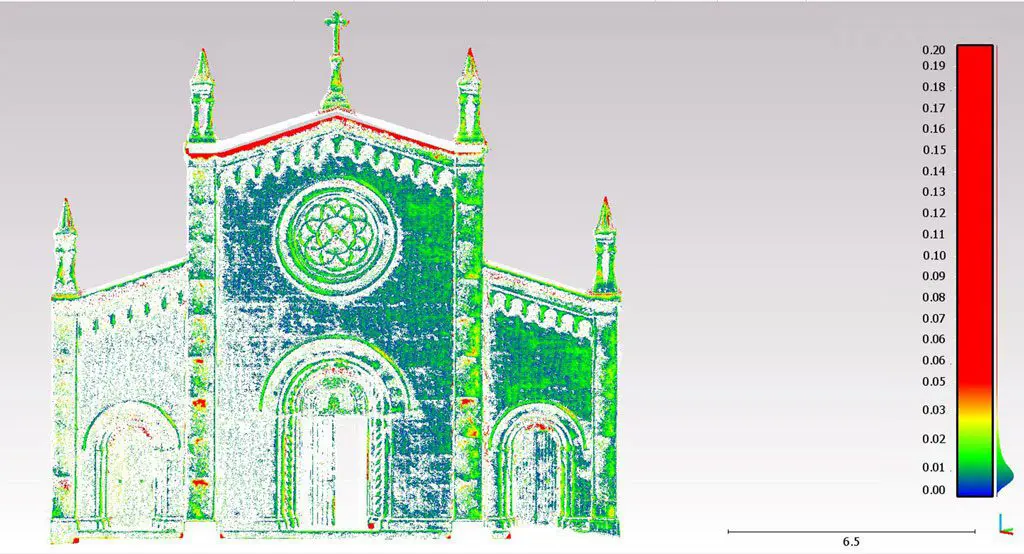
Importando le due nuvole in Cloud Compare è possibile calcolare le differenze metriche tra le nuvole mediante il comando “Cloud to Cloud”;
lanciando il comando è possibile ottenere una stima “statistica”, in cui, per intervalli di deviazioni, un istogramma rappresenta il numero di punti appartenente per ogni intervallo di deviazione tra le due nuvole.
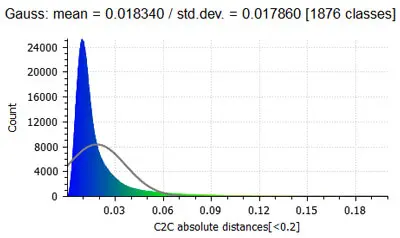
Passando dal discreto al continuo, utilizzando una funzione di Gauss per la stima della media delle deviazioni (µ) e della deviazione standard (σ); si ottiene una distanza media tra le nuvole di punti è di circa 0,018 m e una deviazione standard di circa 0,017 m.
L’overlap tra i fotogrammi
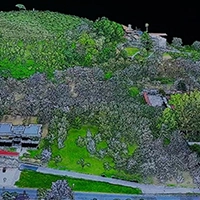
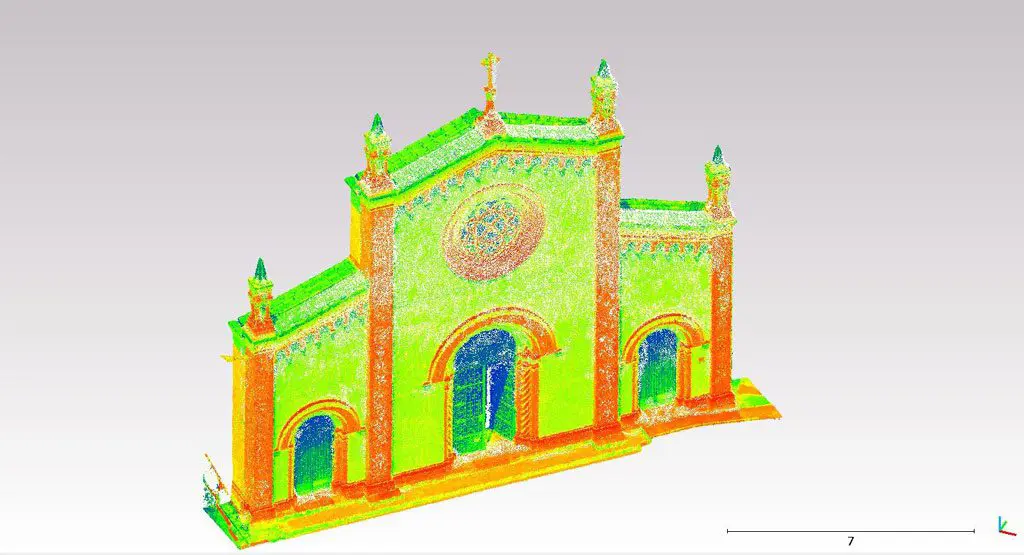
Analizzando l’immagine che segue, si può osservare in rosso le zone con deviazioni calcolate maggiori dei 5 cm, collocate soprattutto sulla parte alta della facciata. Poi in alcuni punti spigolosi della stessa dovute a una minor ovelap tra i fotogrammi o addirittura assente (come avviene al di sotto dell’aggetto della copertura).
Nelle immagini che seguono, è possibile osservare le differenze tra le ortofoto prodotte da TLS e fotogrammetria. Infatti la qualità fotografica delle prese fotogrammetriche rende di un livello superiore la qualità della texture del modello 3D rispetto alla sola acquisizione da TLS.

Ortofoto da TLS

Ortofoto da Fotogrammetria
Infine i due modelli sono stati importati, come scansioni separate, in Autodesk Recap Pro, per una completa visualizzazione dell’insieme
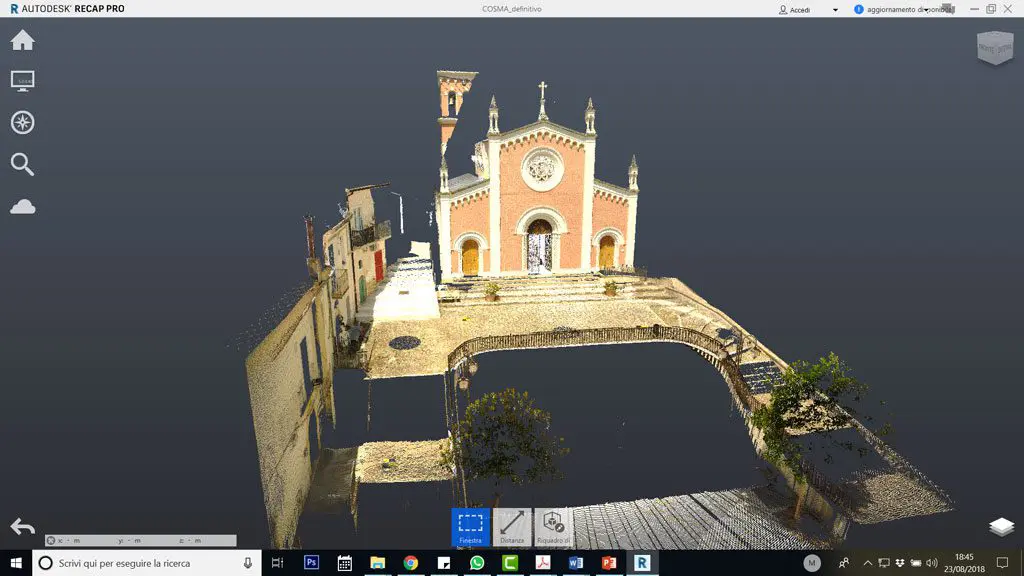
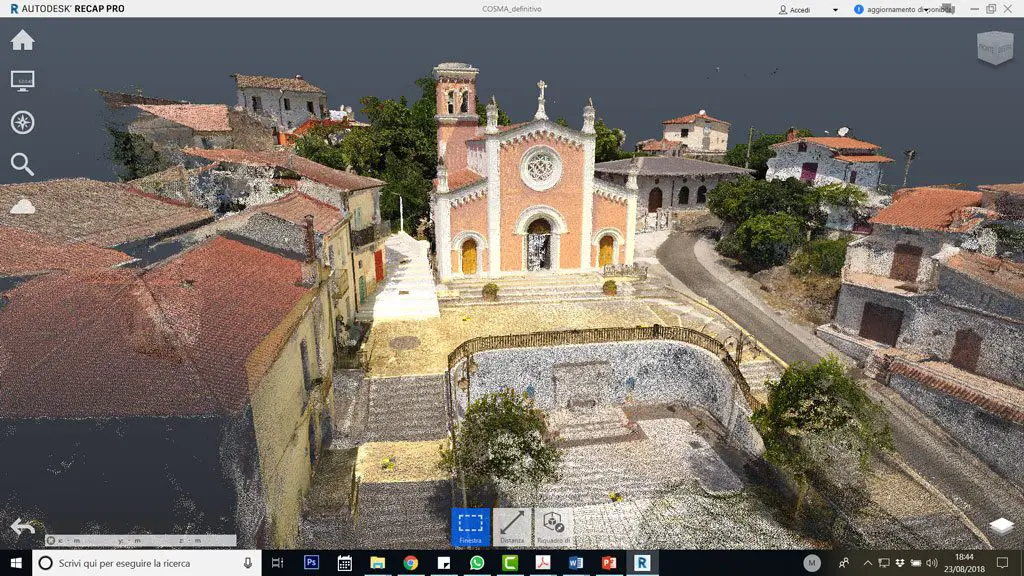
Integrazione dati Recap Autodesk
Il caso di studio dimostra, come l’integrazione tra differenti tecniche di rilievo permette di definire dei sistemi informativi complessi. Questi rendono il modello adatto a rappresentazioni multi-scalari. La rappresentazione digitale consente inoltre di aggiornare continuamente e di integrare nel tempo, nuovi dati e/o elaborati.