


















INDICE
L’avvento di strumentazione a basso costo e prestazioni di alto livello ha introdotto alla realizzazione di infrastrutture, anche autoprodotte, per tutte le attività di posizionamento GNSS, sia a scopo topografico, che geodetico, che di posizionamento navigazionale.
Lo scopo del presente articolo è quello di fornire una descrizione ed alcune linee guida per chi volesse costruire una stazione permanente GNSS in autonomia.
Requisiti
Per costruire una stazione permanente, sono necessarie alcune condizioni al contorno che occorre tenere presente, prima di preoccuparsi dell’acquisto delle componenti e dell’installazione vera e propria.
Intanto, l’antenna GNSS deve poter essere installata in un punto aperto, senza ostruzioni significative, alla vista del cielo e in assenza di altri tipi di interferenze (es: antenne trasmittenti nelle vicinanze o altre interferenze)
Il ricevitore e il resto della componentistica devono poter essere posizionati al riparo da ambiente esterno, eventualmente anche con un armadio stagno dedicato.
È necessario avere una connessione ad internet per poter rendere fruibili i dati; in questo senso, si può predisporre una connessione cablata o wireless, in ogni caso che dia garanzie di continuità.

Funzionalità
Le funzionalità di base della stazione permanente, che abilitano poi i servizi e le utilità che dovrà avere, sono legate essenzialmente alla gestione dei dati grezzi.
-
In particolare, il segnale GNSS dovrà essere acquisito in continuo (h24), ad un rate che va definito in funzione del tipo di applicazione. È chiaro che un rate di 1 secondo è ideale perché consente di avere a disposizione i dati per ogni tipo di post processamento. Occorre, poi, dimensionare correttamente la memoria per archiviare i dati stessi.
-
Deve essere prevista la trasmissione dei dati grezzi in tempo reale ad un client che si colleghi per effettuare un posizionamento GNSS in modalità base-rover.
Deve essere prevista la trasmissione dei dati grezzi ad un server remoto per:
-
l’archiviazione e la messa a disposizione degli utenti;
-
La stazione deve calcolare onsite la propria posizione, e inviarla ad un server remoto.
Scopri il GNSS multifrequenza e multicostellazione Emlid Reach RS2+
Componenti base del sistema
Le componenti base del sistema, da un punto di vista hardware sono le seguenti:
Ricevitore GNSS
In questo caso, una delle soluzioni che propone il mercato, con un buon rapporto tra la qualità e il prezzo, è il modello UbloxF9P (Fig.1).
Si tratta di un ricevitore GNSS multicostellazione (GPS, GLONASS, Galileo, BEIDOU), doppia frequenza, pensato per il rilievo RTK ma che consente di estrarre anche i dati grezzi per lo storage degli stessi. Consente di interfacciarsi con esso mediante USB, UART, SPI.
È consigliabile, per maggiore comodità e usabilità, dotarsi del ricevitore integrato in una board che lo renda maggiormente pronto all’uso e all’integrazione con le altre componenti.

Fig.1 – Board con scheda Ublox F9P integrata
Antenna GNSS
Come anticipato nei precedenti paragrafi, l’antenna deve stare in luogo aperto mentre per il ricevitore ciò non è strettamente necessario. Si può, quindi, utilizzare un cavo coassiale per il collegamento tra antenna e ricevitore, eventualmente anche piuttosto lungo, per collegare i due device. Si tenga, però, presente che una lunghezza eccessiva porta a un “indebolimento” del segnale. In generale, l’indicazione è quella di non andare oltre i 10 metri di lunghezza. L’antenna deve essere monumentata stabilmente, mediante una staffa, ad una struttura considerata solida e stabile nel tempo, per cui non siano previsti spostamenti neppure molto piccoli, al netto di alcuni effetti stagionali che possono esserci. Riguardo al tipo di antenna, alcune soluzioni interessanti sono prodotte dalla Tallysmann (Fig.2) [1], che fornisce un ricco catalogo. Per quanto riguarda le stazioni permanenti, il consiglio è quello di scegliere un’antenna di buon livello, con un ground plane che riduca il più possibile gli effetti di disturbo locale.

Fig.2 – Particolare di antenna GNSS Tallysmann multicostellazione, con ground plane
Microprocessore/PC
Il microprocessore o il pc devono essere presenti nella stazione per poter installare e gestire i SW che consentono di leggere, archiviare, controllare i dati, di inviarli a eventuali server o client, di calcolare la posizione.
In linea di principio, che si tratti di microcontrollore o di pc non fa differenza. È, però, una questione di consumi e di spazio. È chiaro che se la stazione permanente è in una zona in cui si ha accesso ad un ufficio, spazio e nessun problema di alimentazione, si può certamente utilizzare un pc a cui collegare l’uscita del ricevitore.
In caso, invece, la stazione permanente sia collocata in una zona dove sia necessario ridurre spazi e soprattutto consumi (ad esempio, in un punto in cui l’alimentazione debba essere autonoma), di certo occorre utilizzare un microprocessore. In questo caso, si può utilizzare un raspberry Pi3 o modelli successivi.
Scarica la scheda tecnica del GNSS Emlid Reach RS2+
Sistema di alimentazione
Il sistema di alimentazione deve garantire il funzionamento con continuità dell’intero sistema. È chiaro che la soluzione più semplice è quella di una stazione che sia collocata in un luogo in cui sia presente l’alimentazione elettrica. Nel caso è sufficiente collegare il raspberry direttamente alla presa elettrica, con un alimentatore USB.
In alternativa, si può ricorrere all’uso di un pannello solare, anch’esso collegato al raspberry [1].
Configurazione del Raspberry
Una volta procurata tutta la componentistica, occorre installare il sistema operativo e rendere il raspberry usabile. In seguito, verranno poi installati e configurati i software necessari.
Per l’installazione del sistema operativo, è necessario dotarsi di una scheda microSD che deve essere formattata in FAT32. Il sistema operativo si può scaricare da qui [2]. Il file scaricato deve essere decompresso e copiato sulla scheda microSD. In questa fase, è necessario accedere al raspberry, almeno una volta, mediante uno schermo e una tastiera. (Fig.3) Utilizzando le periferiche, è possibile collegare tutti i device necessari.
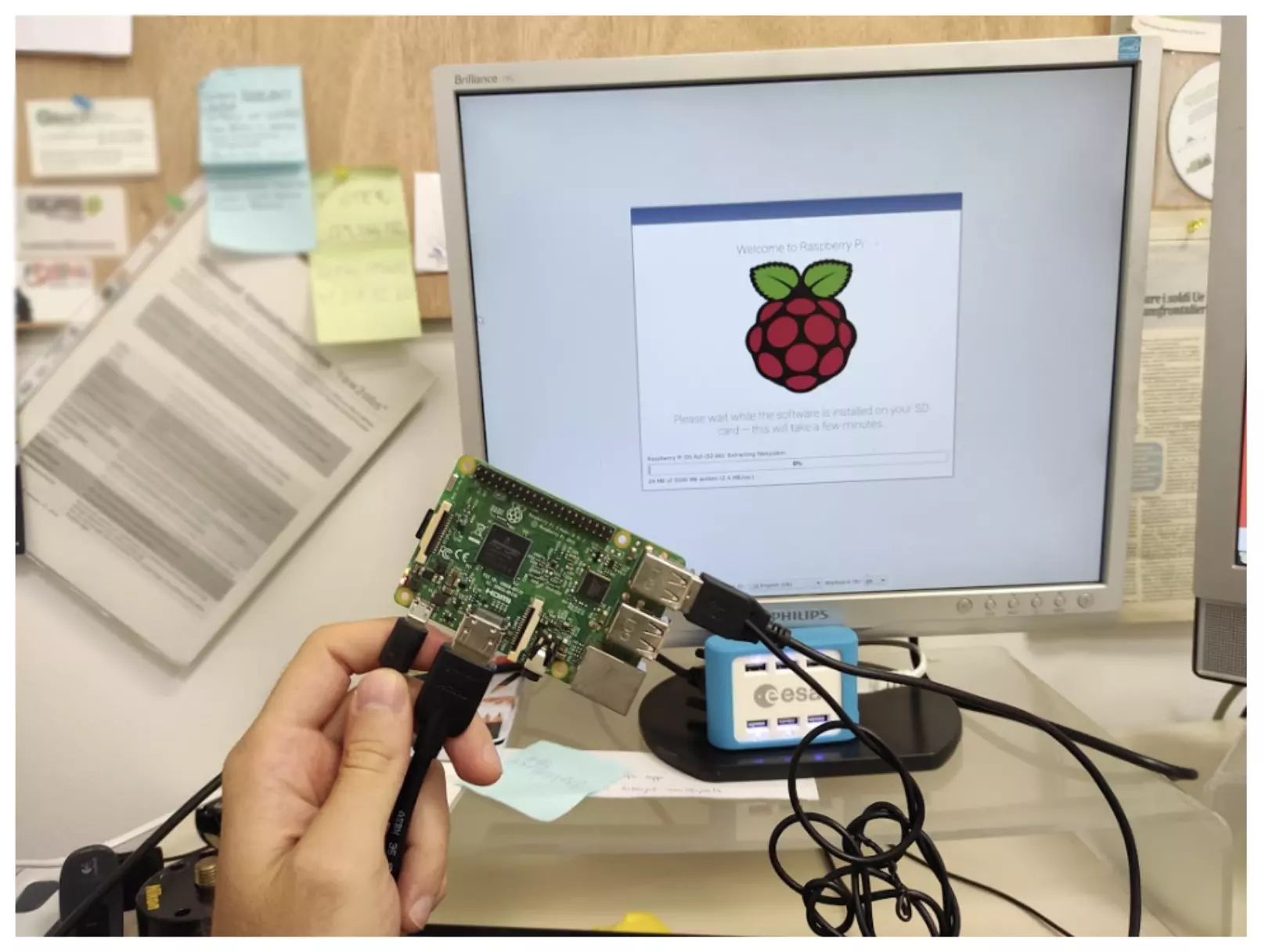
Fig. 3 – Primo collegamento del raspberry a tastiera, mouse e monitor
Seguendo le istruzioni a video, è possibile installare il sistema operativo.
A questo punto, il primo passo da compiere è quello di abilitare la connessione ssh, per potersi connettere al dispositivo da remoto, senza utilizzare ogni volta monitor e tastiera.
Entrando nella configurazione del raspberry, come da immagine sotto, si abilita l’accesso remoto tramite SSH (Fig.4).
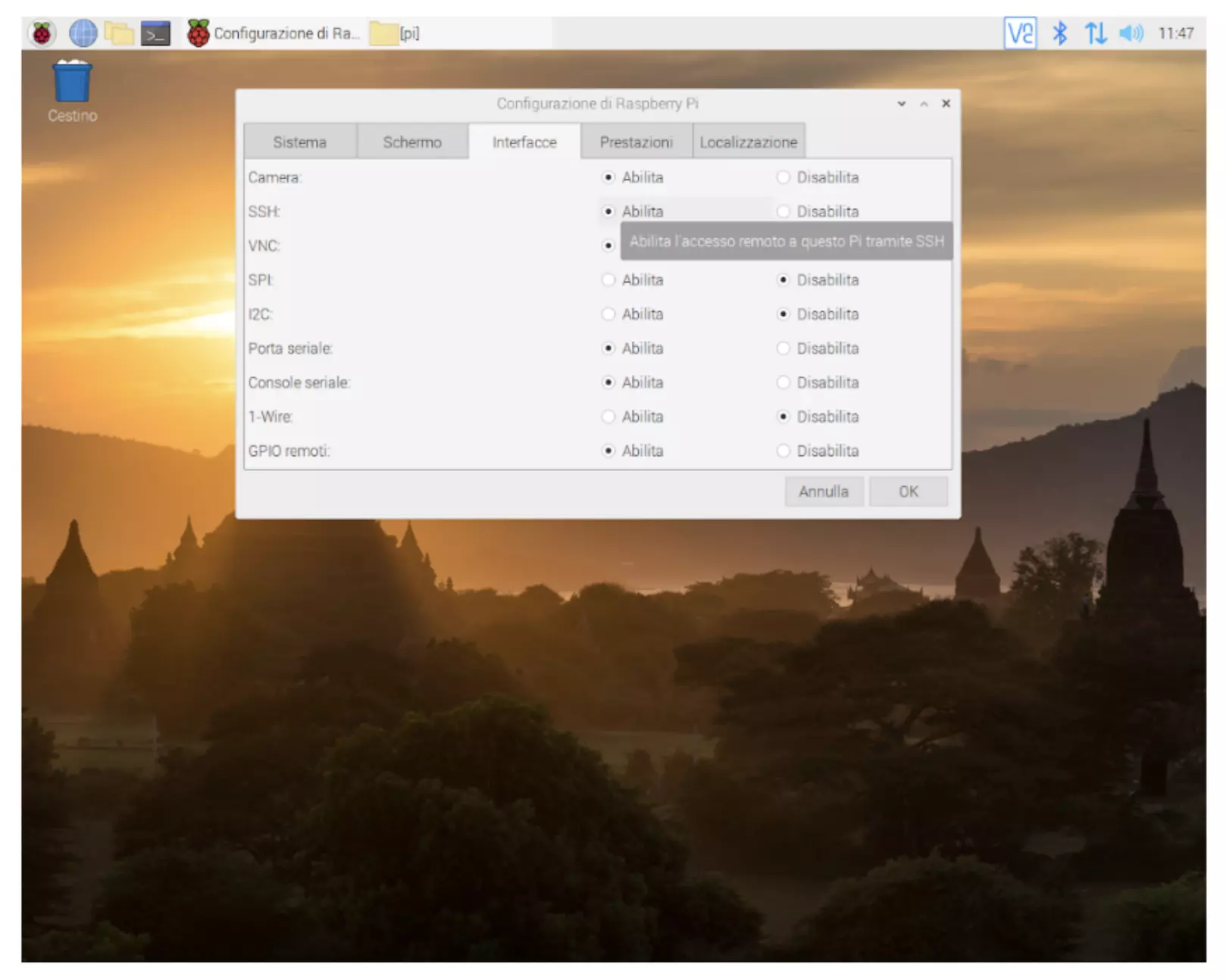
Fig.4 – Menù per l’abilitazione della connessione SSH
Parallelamente, occorre impostare la connessione wifi in modo che il raspberry si colleghi alla rete presente nell’area, che è evidentemente necessaria. In caso non vi siano reti wifi presenti, occorre installare un modem GSM ad-hoc.
Tutto è pronto a questo punto per potersi collegare via ssh al raspberry, da un pc collegato alla stessa rete.
-
Aprire un terminale (su Windows ad es: mobaxterm, su Linux, un terminale)
-
Digitare “ifconfig” e individuare l’IP del raspberry
-
Digitare ssh ip_raspberry -l user
-
di default:
-
User: pi
-
Password: raspberry
-
-
Il collegamento via ssh consente di avere accesso da linea di comando al raspberry e operare, quindi, tutte le azioni successive, di installazione SW, predisposizione dei file di configurazione, lancio dei servizi, eventuale download o upload di file.
Tutto quanto descritto, prevede che ci si possa collegare alla stazione da un rete interna e in linea di principio, dovendo individuare ogni volta l’IP del device mediante il comando ifconfig.
Per ovviare a questo impedimento, e per consentire l’accesso anche da una rete esterna, è possibile assegnare un IP statico e accessibile mediante servizi di “dynamicDNS“, come ad esempio:
Conclusione
Costruire una stazione permanente GNSS in autonomia e a basso costo può essere un utile supporto alle proprie attività di campo in ambito GNSS. Oltre che un interessante ambiente di test per poter fare analisi dei dati, di qualità e di funzionamento dei device.
Il presente articolo è solo la prima parte, in cui si descrive l’architettura, si da un’idea della strumentazione necessaria e delle prime operazioni di configurazione.
Nel prossimo articolo, verranno affrontati i temi della installazione SW e configurazione degli stessi.