


















Il rilievo LIDAR da drone, come noto agli addetti ai lavori, sta diffondendosi molto tra le attività di rilievo territoriale. L’avvento di nuovi sensori più leggeri e maneggevoli, unitamente alla necessità di investimenti meno onerosi, sta contribuendo alla diffusione di tali strumenti e tali modalità di rilievo. Ogni sensore di questo tipo, montato su drone, effettua scansioni continue lungo una traiettoria definita. Il sensore stesso, o in alternativa il drone, è poi dotato di una serie di sensori, tra cui un ricevitore GNSS, che sono necessari per il calcolo della traiettoria precisa.

Rilievo LIDAR: principi di funzionamento
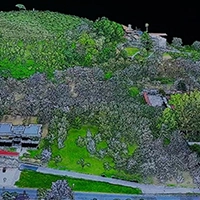
Un sensore LIDAR si basa su di una tecnica di rilievo attiva, per cui il sensore emette dei raggi laser che vengono riflessi dall’oggetto del rilievo. Ciò avviene per ogni istante, secondo per secondo, in continuo. La raccolta di tali informazioni genera quindi una cosiddetta “nuvola di punti” in cui ogni punto ha una terna di coordinate associate. Nel dato grezzo, la terna di coordinate è in prima istanza riferita al punto di emissione, per cui si tratta di una rappresentazione in un sistema di riferimento locale. Affinché ad ogni punto vengano assegnate delle coordinate in un sistema di riferimento globale assoluto, occorre che il punto di emissione del raggio laser abbia anch’esso una terna di coordinate affidabile e robusta.
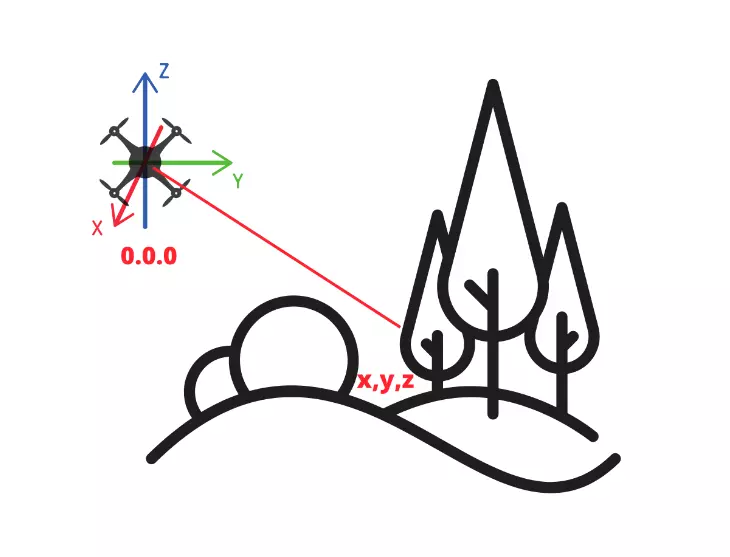 Fig. 1 – Determinazione delle coordinate dei punti in un sistema di riferimento locale
Fig. 1 – Determinazione delle coordinate dei punti in un sistema di riferimento locale

L’allineamento delle strisciate
L’allineamento delle strisciate è quindi quella operazione che consente di comporre una unica nuvola di punti a partire dalle singole scansioni effettuate istante per istante. Tale allineamento avviene, appunto, unendo le singole scansioni in funzione della posizione del punto di presa. In altre parole, è strettamente necessario ricostruire con estrema precisione la traiettoria compiuta dal sensore, in modo che le coordinate associate al sensore, ad ogni secondo, siano stimate con precisione di pochi centimetri.
Non dimenticare di iscriverti al nostro canale You Tube!
I sensori su cui si basa il calcolo della traiettoria sono essenzialmente due: GNSS e IMU.
Entrambi concorrono a determinare le coordinate epoca per epoca, con un intervallo di acquisizione che potrebbe anche essere diverso (a più alta frequenza l’IMU, a frequenza minore il GNSS). Le caratteristiche sono diverse. Come noto, il GNSS determina le coordinate dell’antenna effettuando un processing delle osservabili da satellite, l’IMU, invece, si basa su una serie di sensori che in un sistema di riferimento locale determinano velocità e accelerazioni lineari e angolari.
Il principio è evidentemente quello di integrare le misure indipendenti dei due sensori, da un lato per avere la massima ridondanza, dall’altro per colmare, con i punti di forza di ogni sensore, eventuali gap nelle soluzioni che provengono da ognuno dei due sensori.
Scopri il GNSS multifrequenza e multicostellazione Emlid Reach RS2+
Il GNSS per il LIDAR: RTK o PP
Il calcolo della posizione che abbia sufficiente precisione ed accuratezza, a partire da dati GNSS, può avvenire in tempo reale o in post processing. Questo dipende principalmente dal tipo di sensore LIDAR che si utilizza, nel senso che spesso si tratta di una scelta commerciale, prima ancora che tecnica. Alcuni produttori prevedono che la traiettoria precisa venga calcolata direttamente in tempo reale, quindi già in fase di volo, altri invece prevedono che in campo si acquisiscano soltanto i dati grezzi, per un post processamento. Non c’è una soluzione che in linea di principio garantisca maggiore precisione. Sia il real time che il post processing consentono di raggiungere accuratezze di posizionamento di pochi centimetri. Quello che potrebbe fare un po’ la differenza è invece l’affidabilità. Se, infatti, con un rilievo in RTK, eventuali problemi dovuti, ad esempio, a interferenze o a segnali molto degradati (si pensi a valli molto strette) possono avere un impatto in termini di affidabilità, con un post processamento ci sono maggiori margini per ridurre la presenza di eventuali outlier.
Un rilievo LIDAR in appoggio ad un sistema RTK è generalmente semplice in fase di rilievo. È necessario avere una base RTK, collegata quindi via radio al rover a bordo del drone. Tale base viene accesa in registrazione alcuni minuti prima del decollo, in modo che acquisisca sufficienti osservabili per potersi calcolare le proprie coordinate, e poi invia le correzioni al rover di bordo.
Un rilievo LIDAR che si appoggi ad un rilievo GNSS in post processing prevede, invece, che si metta su un treppiede una antenna e un ricevitore GNSS in una zona relativamente aperta. Se possibile, collegandosi ad una rete di stazioni permanenti in zona, occorre calcolare le coordinate del punto su cui è stata posta l’antenna. Si avvia quindi l’acquisizione dei dati grezzi ad un rate di 1 secondo, che saranno poi scaricati a posteriori per effettuare la post elaborazione.
Vi è da notare che un rilievo in post processing consente di utilizzare un ricevitore qualsiasi, purche abilitato alla registrazione di dati grezzi. Non è quindi necessario avere un ricevitore “accoppiato” al LIDAR, che si colleghi quindi in tempo reale ad esso.

Un ulteriore vantaggio, che deriva strettamente dalla considerazione espressa sopra, riguarda la possibilità di utilizzare anche una stazione permanente nelle vicinanze dell’area oggetto di rilievo, purché siano disponibili i dati grezzi ad un rate di 1 secondo. Nel caso tale stazione sia ad una distanza massima di pochi km dall’area di rilievo, si possono utilizzare direttamente i dati rinex della stazione stessa. Qualora, invece, tale situazione non sia verificata, è possibile accedere ai rinex virtuali che sono messi a disposizione da quasi tutti i servizi di posizionamento regionali e nazionali.
Coordinate della base
Il GNSS in appoggio ad un rilievo LIDAR necessita, in ogni caso, di una stazione base e il rover che è generalmente a bordo del sensore LIDAR sul drone.
La stazione base ha evidentemente un ruolo diverso a seconda che il posizionamento avvenga mediante tecnica RTK o PP ma, in ogni caso, mantiene la funzione di elemento che definisce il sistema di riferimento nel quale la traiettoria viene calcolata, e, di conseguenza, il sistema di riferimento in cui viene poi generata la nuvola di punti.
Scopri tutte le funzionalità e i payload del potentissimo drone DJI Matrice 350 RTK
Nel dettaglio, le coordinate della traiettoria, punto per punto, vengono calcolate mediante una sorta di approccio differenziale tra il rover stesso e appunto la base. Tale approccio differenziale può avvenire in tempo reale, o mediante una post elaborazione, quindi con tecniche leggermente diverse, ma resta il fatto che le grandezze stimate al termine di tale processing, siano, di fatto, delle differenze tra coordinate. In altre parole, vengono calcolate le componenti della baseline tra il rover e la base, secondo per secondo.
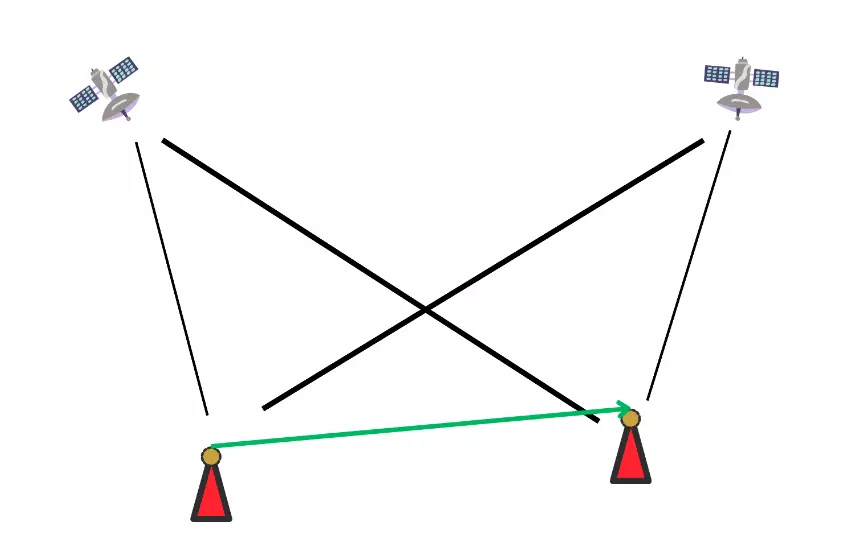
Fig. 2 – Elaborazione differenziale per il calcolo delle componenti delle baseline
È evidente, quindi, che per calcolare le coordinate assolute del rover occorra inserire le coordinate della base, che appunto, in questo modo, definiscono il sistema di riferimento.
Se, ad esempio, le coordinate della base vengono inserire nel processing, in ETRF2000 – 2008.0, anche la nuvola finale sarà nel medesimo SR.
Lo stesso dicasi per la quota. La quota che viene assegnata alla base identifica il sistema di riferimento altimetrico nel quale verrà rappresentata la nuvola di punti. Se si assegna alla base una quota ortometrica, anche la nuvola di punti generata sarà nel medesimo sistema.
Conclusioni
Il ricevitore GNSS a bordo del LIDAR ha un ruolo chiave nella navigazione in tempo reale e viene poi utilizzato per la determinazione della traiettoria, passo fondamentale per il successivo allineamento delle strisciate e conseguente generazione della nuvola di punti completa.
Nell’articolo, si sono analizzate le due modalità di calcolo della traiettoria mediante GNSS, RTK o Post processing. Evidenziano caratteristiche strettamente legate a questo caso applicativo, che è evidentemente molto specifico e particolare.