
GNSS Monofrequenza o Multifrequenza: quale scegliere?
Scegliere tra GNSS monofrequenza e multifrequenza dipende dal tipo di rilievo, dalla precisione richiesta e dalle condizioni operative. In questo articolo vediamo le differenze principali e quando conviene scegliere una soluzione rispetto all’altra.
In questo articolo
- Caricamento indice…
Nello sterminato panorama commerciale, infatti, non è sempre semplice capire quale sia la scelta migliore e, soprattutto, quale sia lo strumento più adatto alle nostre esigenze.
Ecco perché, per te che stai pensando di acquistare un nuovo - o il primo- ricevitore GNSS, o semplicemente per soddisfare la sete di conoscenza dei più curiosi, abbiamo pensato di pubblicare un piccolo vademecum che ti aiuterà a comprendere le differenze tra i due tipi di ricevitori e a scegliere la migliore soluzione per te! Partiamo dalle basi.
Le Frequenze: come funzionano?
Prima di addentrarci nel cuore del problema e scoprire cosa differenzia i ricevitori GNSS Monofrequenza da quelli multifrequenza è fondamentale comprendere cosa sono le frequenze e come funzionano.
I sistemi di posizionamento satellitare, quali che siano (GPS, GLONASS, Galileo, etc.), si basano su di un segnale elettromagnetico che viene costantemente inviato dal satellite, “raccolto” dall’antenna a terra e inviato al ricevitore.
Tale segnale si compone di un’onda sinusoidale portante che viene poi modulata secondo criteri diversi e con segnali diversi a seconda della costellazione. In ogni caso ogni segnale ha una collocazione nello spettro delle frequenze che lo differenzia dagli altri.
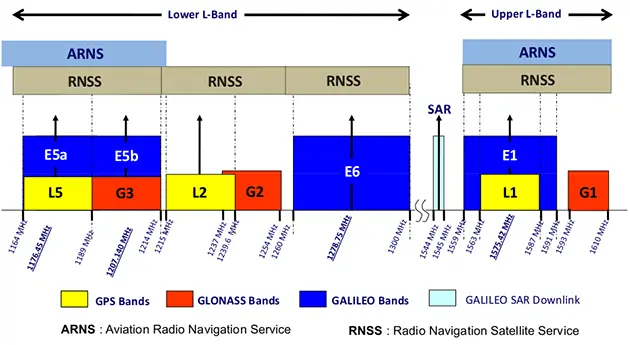
Al di là degli aspetti legati alla generazione del segnale e alla ricezione dello stesso, che impattano sull’elettronica dei ricevitori, ciò che è interessante notare è il fatto che diverse frequenze risentono in maniera diversa di alcuni effetti di disturbo sul segnale.
Questo è un dato molto importante perché in questo modo è possibile, per il ricevitore o per i software di processing, modellare alcuni disturbi, eliminarli o mitigarne l’impatto in maniera più o meno accurata. Questi effetti di disturbo sono il motivo per cui la precisione dei rilievi GNSS degrada, in funzione del tipo di ricevitore e di rilievo. L’approccio NRTK, ad esempio, ha esattamente lo scopo di facilitare la comprensione, la modellazione e la mitigazione di tali effetti di disturbo.
Multifrequenza: quando è un vantaggio?
Il caso classico dove risulta evidente il vantaggio della multifrequenza, riguarda il disturbo ionosferico. La ionosfera è quella porzione di atmosfera ricca di ioni, compresa tra i 20 e i 200 km al di sopra della superficie terrestre, attraverso la quale il segnale satellitare viene ritardato. Tale ritardo impatta evidentemente sul calcolo della distanza satellite-ricevitore che viene determinato moltiplicando per la velocità della luce il tempo che il segnale impiega a raggiungere il ricevitore.
Una distanza satellite - ricevitore poco corretta si traduce in una scarsa accuratezza nella stima delle coordinate del ricevitore.
Peraltro la ionosfera genera un disturbo che ha un comportamento variabile nel tempo, dipendente da tanti parametri e che quindi è difficile da modellare in maniera univoca. Lo stesso non avviene invece per la troposfera il cui effetto di disturbo non preoccupa molto poiché appunto esistono modelli che bene lo rappresentano.
Il modo migliore di trattare l’effetto ionosferico, non potendolo modellare, è appunto quello di usare la doppia frequenza con cui, in fase di processing, è possibile eliminare tale disturbo.
L’effetto ionosferico agisce in maniera diversa sulle due frequenza e, pur non essendo noto il valore assoluto di tale effetto, è invece nota la relazione con cui agisce su una e sull’altra frequenza. Da tale informazione, mediante una combinazione lineare delle equazioni, si riesce ad eliminare appunto l’intero disturbo.
GNSS Monofrequenza o Multifrequenza: quando scegliere l'uno e quando l'altro?
Se si necessita di un ricevitore per rilievi precisi ed accurati la doppia frequenza è sicuramente importante e lascia maggiori margini di manovra. Per un rilievo base-rover, ad esempio, ci svincola dalla necessità di avere basi troppo corte; l’effetto di disturbo ionosferico per basi lunghe, indicativamente superiori ai 10 km, impatta in maniera decisiva sull’accuratezza del posizionamento.
In tal senso è opportuno avere un ricevitore doppia frequenza con base line superiori ai 10 km.
Con basi inferiori può essere sufficiente un ricevitore singola frequenza. Questo è un po’ meno vero se si fanno rilievi in tempo reale, in appoggio a reti di stazioni permanenti. In quei casi i disturbi atmosferici vengono modellati dalla rete stessa, che peraltro genera delle basi virtuali solitamente vicine al punto in cui si staziona con il rover, con il risultato che, di fatto, la nostra baseline è sempre piuttosto corta.
Altre caratteristiche del Multifrequenza
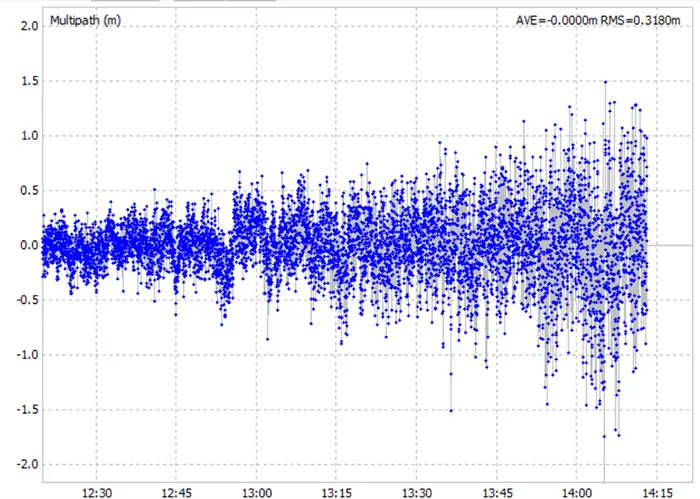
Un altro importante valore aggiunto dato dalla presenza di più frequenze sta nella possibilità di identificare effetti locali, quali appunto il multipath. Il principio è piuttosto simile a quanto detto per la ionosfera. Anche il multipath è un effetto di cui non conosciamo in maniera dettagliata il comportamento a priori, e perciò non può essere modellato. In più è un effetto locale, che dipende strettamente dalle condizioni al contorno e può cambiare sensibilmente se anche la posizione del ricevitore cambia di poco. In tempo reale diventa complicato da individuare anche con le due frequenze. Ci sono diverse tecniche per affrontare almeno parzialmente il problema, ma in generale si cerca di limitarne l’effetto individuando dei filtri sul “rumore” dei segnali in arrivo. In ogni caso, più facilmente in Post Processamento, le due frequenze ci garantiscono la possibilità di stimare gli effetti di multipath per ogni satellite.
Nella figura sotto è rappresentato l’andamento del multipath, per un singolo satellite, realizzato a partire dall’analisi delle osservabili GPS di un file rinex.
Al di là della mitigazione dei singoli disturbi poi, un ricevitore multifrequenza consente di registrare un numero di osservazioni notevolmente più alto rispetto ad un ricevitore singola frequenza. Si tenga presente che con ogni frequenza ricevuta proveniente da ogni singolo satellite, il ricevitore è in grado di scrivere una equazione di osservazione. Le incognite di questo sistema sono le coordinate del ricevitore, le ambiguità iniziali di fase, e una serie di effetti di disturbo. Risolvere questo sistema è il passaggio necessario per poter fissare le ambiguità e determinare le coordinate del ricevitore con le precisioni tipiche del posizionamento di fase. Ora è evidente che, se per ogni secondo di rilievo acquisisco due osservazioni anziché una (in caso di doppia frequenza) il numero di informazioni che memorizzo, utili a risolvere il sistema, cresce più rapidamente.
Sia che si tratti di un rilievo in Post Processing, in cui si acquisiscono dati grezzi, sia che si tratti di un rilievo in Real Time, in cui si effettua il posizionamento in appoggio ad una base o una rete di stazioni permanenti, diminuisce generalmente il tempo di stazionamento, anche in maniera sensibile.
Nel primo caso, uno stazionamento su di un punto fisso per acquisire dati grezzi può dimezzare con un ricevitore a doppia o multifrequenza rispetto ad un singola frequenza.
Nel secondo caso il cosiddetto TTF (Time To Fix), cioè il tempo necessario affinché il controller ci indica che è stata raggiunta la modalità “FIX”, si riduce in maniera apprezzabile con ricevitori multifrequenza.
Tutto è poi ovviamente da rapportarsi alle precisioni richieste, alle condizioni al contorno, al tipo di ricevitore. Ma in generale la maggiore rapidità di un rilievo con ricevitore multifrequenza è verificata.
E allora quale ricevitore GNSS per lavorare al meglio?
E’ chiaro da quanto detto, che in assoluto la multifrequenza, come il nostro Emlid Reach RS2, fornisce prestazioni migliori. E’ altrettanto vero che in termini di costo ci sono spesso differenze sostanziali.
E allora occorre saper scegliere in base alle esigenze, alle precisioni richieste, ai tipi di rilievo.
In sintesi un ricevitore singola frequenza, come Emlid Reach RS+, è adatto se i rilievi che si devono affrontare non sono particolarmente onerosi, non comprendono tanti punti e non richiedono precisioni spinte.
Per fare un esempio, il rilievo di GCP in appoggio ad un rilievo fotogrammetrico, può essere tranquillamente fatto con ricevitori singola frequenza in modalità NRTK. Si raggiungono le accuratezze di qualche centimetro, sufficienti per questo tipo di applicazione, e qualche secondo in più di stazionamento su ogni punto non impatta sull’economia del rilievo.Rilievi di reti di servizi, che tipicamente non richiedono precisioni spinte, possono essere fatti con ricevitori singola frequenza.
Rilievi GNSS per applicazioni di monitoraggio o per realizzare reti di inquadramento hanno bisogno di tempi di stazionamento alti e richiedono una modellazione degli effetti di disturbo piuttosto spinta. Ancora, se generalmente si effettuano rilievi in modalità NRTK, con grandi moli di punti, può essere utile avere un ricevitore che consenta di arrivare al “FIX” in tempi brevi. In questi casi, quando ci si deve spingere ad accuratezze vicine al centimetro o si realizzano rilievi di tanti punti, un ricevitore doppia frequenza è generalmente preferibile.
GNSS Monofrequenza o Multifrequenza: Come procedere?
Qualunque sia la tua esigenza e qualunque sia la tua scelta noi ti possiamo aiutare!
I nostri consulenti ti accompagneranno nella scelta dello strumento più adatto alle tue esigenze e ti garantiranno tutta l'assistenza e il supporto di cui avrai bisogno nel post vendita!
Potrebbero interessarti...

FJD Trion P2: cosa cambia con il firmware V1.2.0
Il firmware V1.2.0 di FJD Trion P2 introduce nuove funzioni per migliorare scansione, gestione del rover, foto integrate, punti di controllo e rilievi estesi. L’articolo anali…
Leggi di più
Scansione 3D georeferenziata: come lavorano insieme GNSS RTK e LiDAR
La scansione 3D georeferenziata unisce GNSS RTK e LiDAR per ottenere nuvole di punti già posizionate nel mondo reale. L’articolo spiega come lavorano insieme, quali vantaggi …
Leggi di più
Rilievo 3D professionale: perché le misure contano più del colore
Nel rilievo 3D una nuvola di punti colorata non è sempre la scelta migliore. L’articolo spiega quando il colore può rallentare scansione, elaborazione e consegna, e perché …
Leggi di più