


















INDICE
- 1 Il Sistema PPK
- 2 L’autore del rilievo fotogrammetrico senza target
- 3 Normativa e sicurezza
- 4 Strumenti e fasi di lavoro
- 5 Hardware e Software utilizzati
- 6 Il rilievo preliminare
- 7 Posizionamento dei Target
- 8
- 9 Rilievo dei GCP
- 10 La Base Station
- 11 Il drone DJI Mavic 2 Pro PPK e il volo
- 12 La restituzione dei dati eseguita in ufficio
- 13 Ricostruzione 3D dell’oggetto del rilievo senza target
In questo articolo raccontiamo l’esperienza del nostro cliente Alessandro Vernassa sull’utilizzo del Sistema PPK a bordo drone che consente di operare in ambito fotogrammetrico senza target.

Prima di immergerci nella lettura, che spiega i vari passaggi eseguiti, è bene capire in che cosa consiste il sistema PPK e quali sono i vantaggi derivanti dall’utilizzo di tale tecnica in un rilievo topografico.
Il Sistema PPK
Il PPK (Post-Processed Kinematic) è una tecnica alternativa di rilievo rispetto all’ RTK (Real-Time Kinematic).
Sei sicuramente abituato ad utilizzare un GPS (o meglio un GNSS) per i tuoi rilievi tradizionali. In questo caso, per velocizzare i tempi di raccolta dati, si utilizza la tecnica RTK.
Invece, dotando un drone di un GNSS supplementare e remotando lo scatto della camera di bordo, il flusso di lavoro avviene in PPK. Ciò significa che il posizionamento accurato non sarà in tempo reale ma che tutti gli algoritmi di correzione saranno applicati in seguito, grazie a specifici software (da qui Post-Processed).
Affinché si abbiano i dati necessari per un post-processo è necessario avere a disposizione un GNSS fisso a terra e un Drone (Rover) equipaggiato con un PPK .
Sia il GNSS che fa da base, che il Rover Drone, registreranno dati grezzi che saranno successivamente elaborati per avere un posizionamento accurato.
Il vantaggio di questa tecnica è il fatto che la Base e il Rover non dovranno essere in collegamento tra loro. Non avrai quindi, ad esempio, la problematica di distanza tra i due e la configurazione delle apparecchiature risulterà essere molto più semplice.
Inoltre questa metodologia non ti costringe, a differenza di altre soluzioni RTK presenti sul mercato, ad avere una specifica marca di strumenti. Qualsiasi GNSS utilizzerai per registrare dati a terra andrà bene, purché possa fare da base e registrare dati in modalità statica (potrai verificare questa informazione con il produttore della tua apparecchiatura).
Lavorare in PPK offre anche una notevole flessibilità, in quanto, in post-processing potrai eseguire più volte l’elaborazione dei dati grezzi utilizzando impostazioni differenti – cosa non fattibile in RTK.
Utilizzare il Sistema PPK per la mappatura da drone ti porterà indubbi vantaggi tra i quali il posizionamento di un numero minimo di marker a terra che saranno utilizzati solo a scopo di controllo del risultato finale, ma non per georeferire il modello 3D (ecco perché si parla di fotogrammetria senza target) , la possibilità di lavorare su aree molto più ampie o, cosa ancora più importante, mappare zone di difficile accesso (si pensi a cave, discariche, etc).
Un ultimo aspetto che deve essere tenuto in considerazione, ma non per questo meno importante, è il fatto che con questo sistema potrai lavorare in qualunque parte del mondo in completa autonomia (il DJI Phantom 4 RTK che viene offerto dalla omonima casa, non consente questa flessibilità, in quanto non permette di volare in paesi o regioni differenti da quelle di acquisto).
Di seguito uno schema di funzionamento di un sistema PPK per Drone.
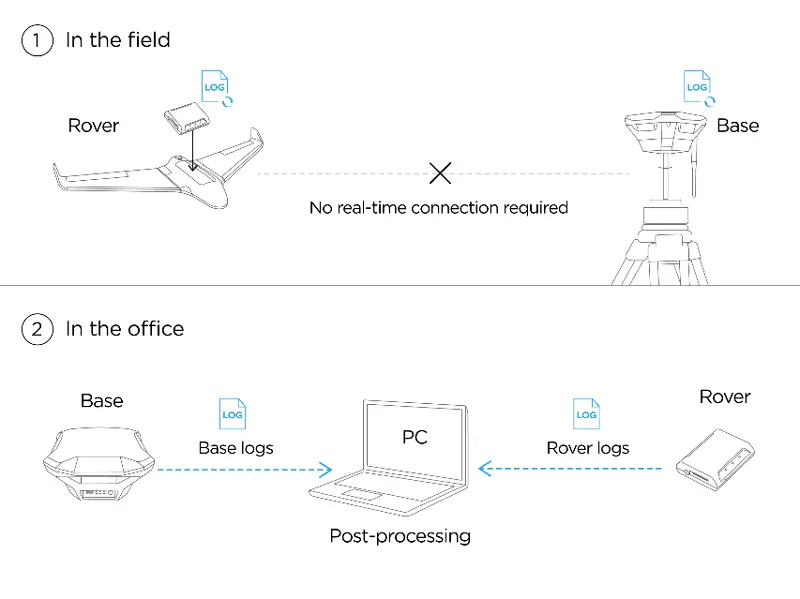
Schema di funzionamento di un sistema PPK per Drone che consente di effettuare fotogrammetria senza target
L’autore del rilievo fotogrammetrico senza target
Lo Studio Multiprogetto di Alessandro Vernassa si trova a Cuneo ed è attivo da molti anni nel settore della fotogrammetria. Alessandro, il titolare, ha accumulato parecchia esperienza nel campo dei droni. Dai primi auto-costruiti è passato a modelli che sempre di più potessero soddisfare le esigenze dei lavori che si trovava ad affrontare. Dopo aver conseguito il brevetto di pilota di drone, Alessandro, si è trovato spesso di fronte a situazioni dove, per rispettare i dettami della fotogrammetria, c’era l’esigenza di piazzare target (GCP) in zone il più delle volte irraggiungibili con conseguente incremento di ore di lavoro e rischi fisici per se stesso, soprattutto, quando le condizioni orografiche del terreno erano quasi proibitive.
La svolta è arrivata per Alessandro quando ha approcciato il sistema PPK. La soluzione, dedicata al DJI Mavic 2 PPK e acquistata su www.strumentitopografici.it, ha fatto sì che Alessandro potesse realizzare delle interessanti esperienze nel campo della fotogrammetria senza utilizzare target e che decidesse di condividerne una con tutti noi.
Normativa e sicurezza
È importante sottolineare che, durante il rilievo, le operazioni di volo in area critica sono state possibili in quanto Alessandro è operatore ENAC autorizzato. Come da regolamento, verifica sempre preliminarmente la presenza di persone nell’area del volo ed eventualmente perimetra la zona con bandelle colorate in modo da interdire il più possibile l’area di volo al pubblico.
Strumenti e fasi di lavoro
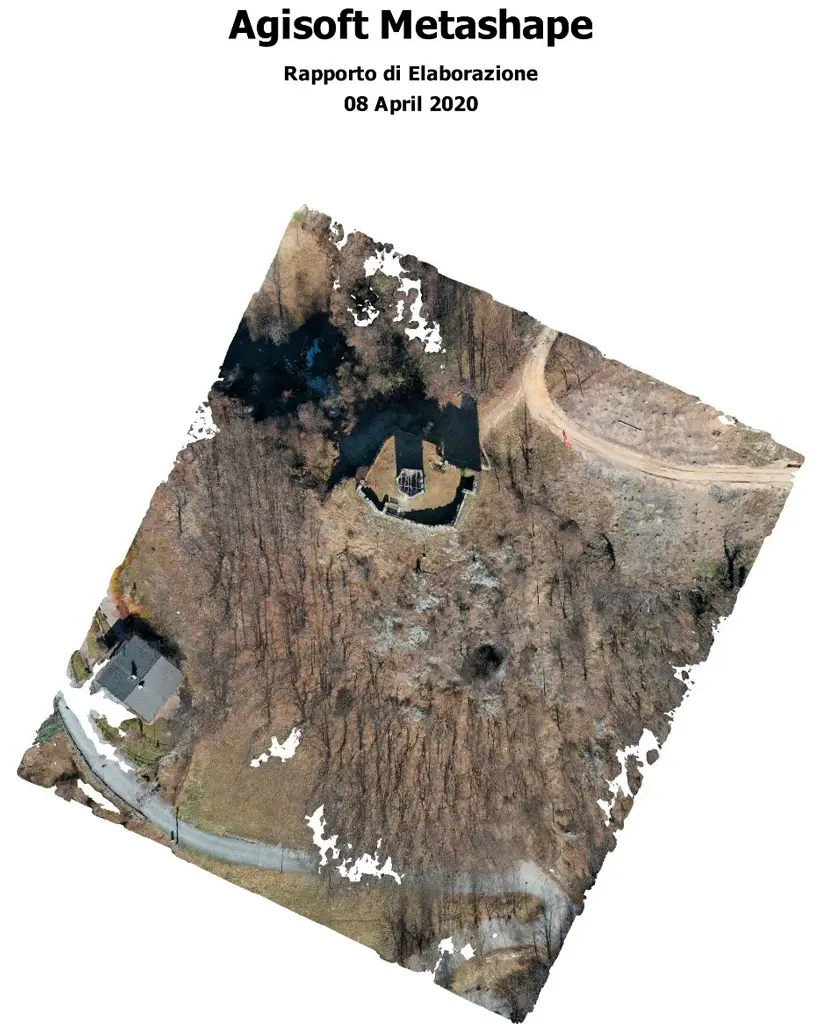
La ricostruzione tridimensionale aerofotogrammetrica del Castello Tourusela è stata realizzata con l’intento dell’allestimento di elaborati grafici, per la presentazione di una pratica architettonica relativa al Castello dei Lascaris sito in Vernante (Cuneo), consistente in un modello tridimensionale, tavole al tratto e relativa modulistica, propedeutiche al rilascio di autorizzazione paesaggistica di un bene paesaggistico tutelato con vincolo architettonico e archeologico.
Le operazioni di volo sono state effettuate:
– con camera nadirale per evidenziare i particolari planimetrici dell’oggetto del rilievo,
– con camera inclinata rispetto al manufatto per cogliere la profondità tridimensionale,
– con missione perimetrale rispetto alle facciate del castello per evidenziare la tessitura muraria ed eventuali danni strutturali dei resti storici presenti.
Hardware e Software utilizzati
- DJI Mavic 2 PPK
- GNSS Emlid Reach Rs2
- Palina per GNSS e Bipode (per i GCP di controllo)
- Metashape Pro (software di fotogrammetria)
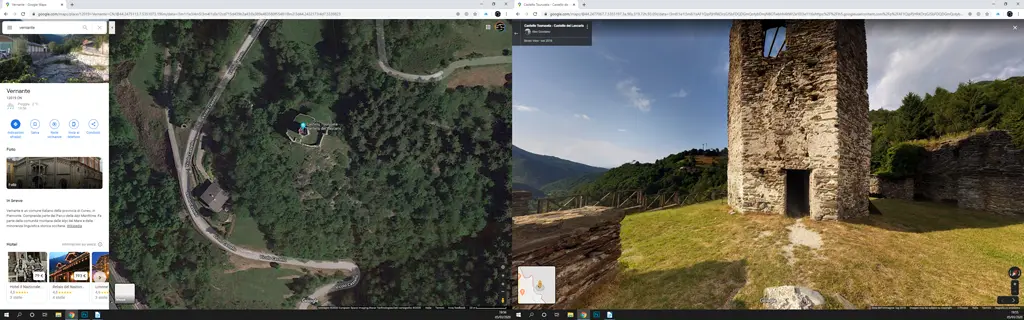
Il rilievo preliminare
La fase di rilievo preliminare è stata eseguita in ufficio. Grazie a Google Maps si è ottenuta una visualizzazione del sito archeologico oggetto del rilievo. Questa prima fase è stata necessaria per individuare a priori eventuali problematiche da approfondire in fase di rilievo (presenza di cavi elettrici, ostacoli fisici, criticità del luogo, presenza di case nelle vicinanze,…). Casistiche, queste, che potrebbero rappresentare casistiche insite nella tipologia di rilievo svolto in aree critiche, così definite dalla vigente normativa Enac.
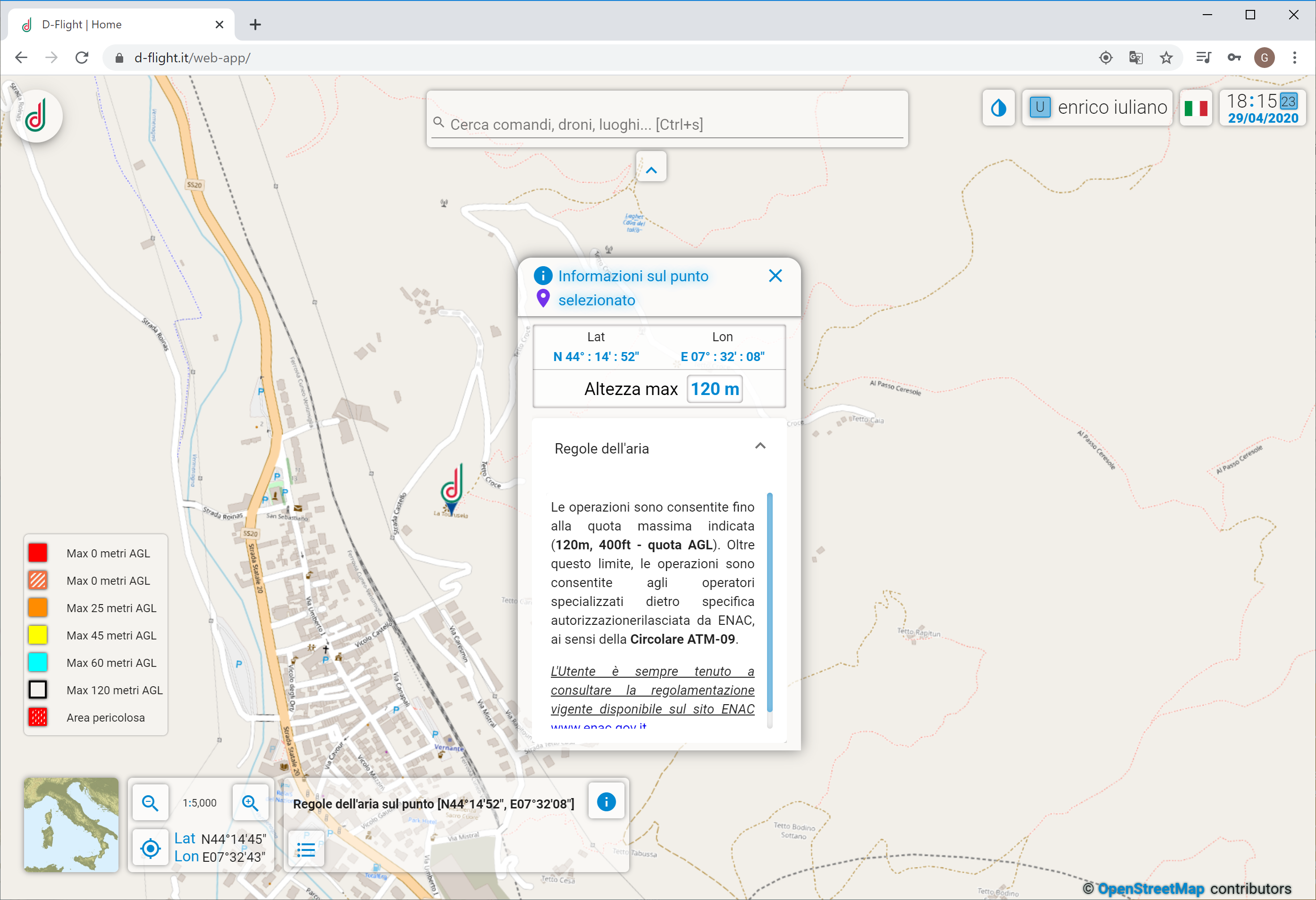
Successivamente sono state verificate le condizioni di fattibilità del rilievo, mediante visione sul sito istituzionale di riferimento ENAV D-FLIGHT (https://www.d-flight.it/) e software grafici di supporto (non probatori)
L’ultima fase del rilievo preliminare è stata la programmazione a tavolino delle missioni di volo, (in questo caso è stato scelto il software Topografo)
Per il presente rilievo aerofotogrammetrico, si è tenuto conto della quota idonea di volo, partendo dal GSD (Ground Sampling Distance) indicato dalla committenza.
Grazie alle funzioni di pianificazione del volo – presenti su Topografo- si è stabilita la percentuale di sovrapposizione frontale e laterale dei fotogrammi (in modo da coprire l’intera area di rilievo e nel contempo avere un database robusto di fotografie).
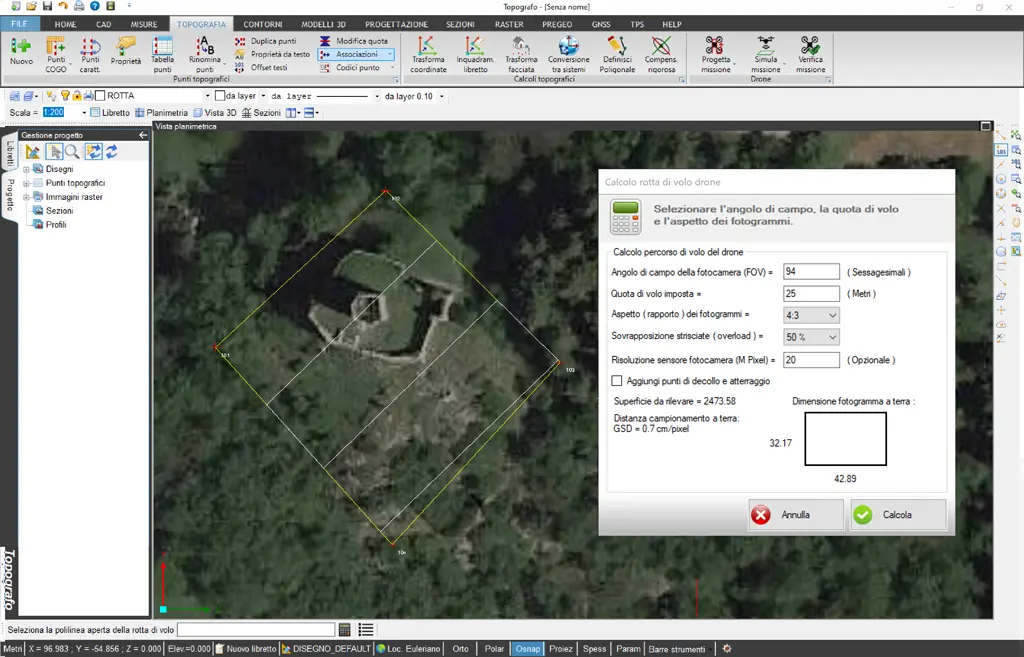
Altra importante informazione scaturita dalla programmazione della missione di volo è la durata in minuti della stessa. In questo modo si è potuto definire il numero di batterie necessarie per portare a termine il lavoro in condizioni di sicurezza (per questo lavoro sono state effettuate prese nadirali, inclinate e frontali rispetto alle facciate del manufatto).
Verifiche preliminari sul posto
Sul posto si è provveduto a verficare ciò che dalle immagini satellitari di Google poteva non essere facilmente visibile, come ostacoli derivanti da cavi elettrici o installazioni successive alla data delle foto satellitari stesse. Inoltre si è potuta appurare la morfologia plano-altimetrica del sito per la conferma finale del piano di volo redatto in ufficio.
Un volo di ispezione preliminare con l’APR è stato eseguito per evidenziare eventuali problematiche, da una prospettiva aerea, non evidenti da terra.
Tutto ciò è propedeutico alla riuscita del rilievo definitivo programmato.

Posizionamento dei Target
La tecnologia PPK non necessita di target per il rilievo fotogrammetrico ma, trattandosi di un rilievo oltre che commissionato anche da utilizzare a scopo dimostrativo, si è pensato di inserire qualche target in più rispetto a quelli che normalmente vengono utilizzati con tecnologia PPK per meglio comprendere le precisioni raggiungibili.
La dimensione scelta è 60X60 cm e, i target, sono stati omogeneamente distribuiti sia in planimetria che in altimetria. Tali dimensioni, unitamente alla colorazione preferibilmente del colore diverso dallo sfondo su cui sono posti, fanno sì che possano facilmente essere identificabili dalla quota alla quale si decide di volare.

Anche se i GCP non servono nel rilievo con PPK, questi vengono posizionati per valutare la bontà del rilievo
Rilievo dei GCP
È il cosiddetto rilievo di appoggio in fotogrammetria classica. Nel nostro caso, il rilievo dei ground control point, è servito a collezionare le coordinate dei punti di controllo identificati dai target apposti. Questi ultimi saranno utilizzati a valle della post-elaborazione dei dati grezzi registrati da Drone e GNSS per verificare l’accuratezza del rilievo eseguito.
Il rilievo dei GCP è stato effettuato tramite GNSS Emlid Reach RS2, strumento multi costellazione. Data la buona ricezione presente sul territorio oggetto del rilievo, si è utilizzata la configurazione solo Rover con correzione regionale.
Sempre nell’ottica di utilizzare questo rilievo anche a scopo didattico, sono state rilevate sul manufatto delle misure mediante stazione elettro ottica senza prisma.
La Base Station
Il GNSS Emlid Reach RS2 fornito da Strumenti Topografici ha la peculiarità di poter essere utilizzato sia come Rover (e quindi ricevere le correzioni dalle basi fisse presenti sul territorio in modalità NTRIP ovvero con la connessione ad internet disponibile grazie alla SIM integrata) sia come Base e quindi lavorare in statico.
Dopo aver posizionato la base ed ed aver avviato la registrazione dei dati in modalità Statica, si è passati all’avvio del Drone DJI Mavic Pro 2 PPK fornito sempre da Strumenti Topografici.
Il drone DJI Mavic 2 Pro PPK e il volo
Il piccolo gioiello di casa DJI è stato scelto da Alessandro anzitutto per la sua praticità nell’utilizzo quotidiano, pesa meno di 1 Kg, e poi per l’ottimo rapporto prezzo prestazioni. Quando Alessandro ha saputo delle potenzialità che il suo strumento poteva sviluppare, ha immediatamente eseguito l’upgrade al kit RTK/PPK al fine di fare fotogrammetria senza target. La modifica è poco invasiva e l’antenna GNSS è svitabile per riporre il drone nella sua custodia originale.

Il ricevitore GNSS L1/L2 GPS/GLONASS/Galileo/Beidou è integrato con la fotocamera HASSELBLAD da 20Mp e funziona in modalità PPK (Post-Elaborazione). Grazie a questa soluzione è possibile ottenere risultati accurati fino a velocità di crociera di 10/ms e con un raggio di lavoro dalla base di 20/30 Km. La posizione delle foto viene registrata con accuratezze centimetriche.
Il grosso vantaggio di questa tecnologia è la riduzione drastica se non l’eliminazione, dei punti di controllo a terra da registrare. Fare fotogrammetria senza target equivale ad avere una maggiore velocità nell’esecuzione dei lavori, risparmio di tempo, aumento della sicurezza dell’operatore che non è più costretto a posizionare i target in zone che possono essere pericolose (versanti montuosi, cave, discariche, zone impervie,…).
Dopo il consueto controllo del vento presente tramite anemometro si è passata all’esecuzione di n° 2 sessioni di volo con la realizzazione di 470 prese fotografiche e relativi dati grezzi di volo registrati dal GNSS integrato sul drone e immagazzinati sulla scheda SD dedicata.
Il volo automatico è stato eseguito grazie all’ausilio dell’app Litchi.
Va’ ricordato che mentre il drone è in volo non ha alcun collegamento con la stazione base fissa a terra che continua a registrare dati grezzi in statico.
La restituzione dei dati eseguita in ufficio
Al termine della fase di rilievo si è tornati in ufficio con:
- Fotografie scattate dal Drone
- File dati grezzi posizione drone
- File dati grezzi osservazione della base
- Coordinate WGS 84 della base
- Coordinate WGS 84 dei GCP
Grazie al software fornito con l’acquisto della soluzione DJI Mavic 2 Pro PPK non si è dovuto utilizzare nessun applicativo di terze parti per l’elaborazione dei dati grezzi registrati da drone e base. In pochi minuti sono stati elaborati Rinex e UBX registrati ed è stato creato il file TXT contenente le coordinate dei centri di presa delle fotografie con precisione centimetrica.
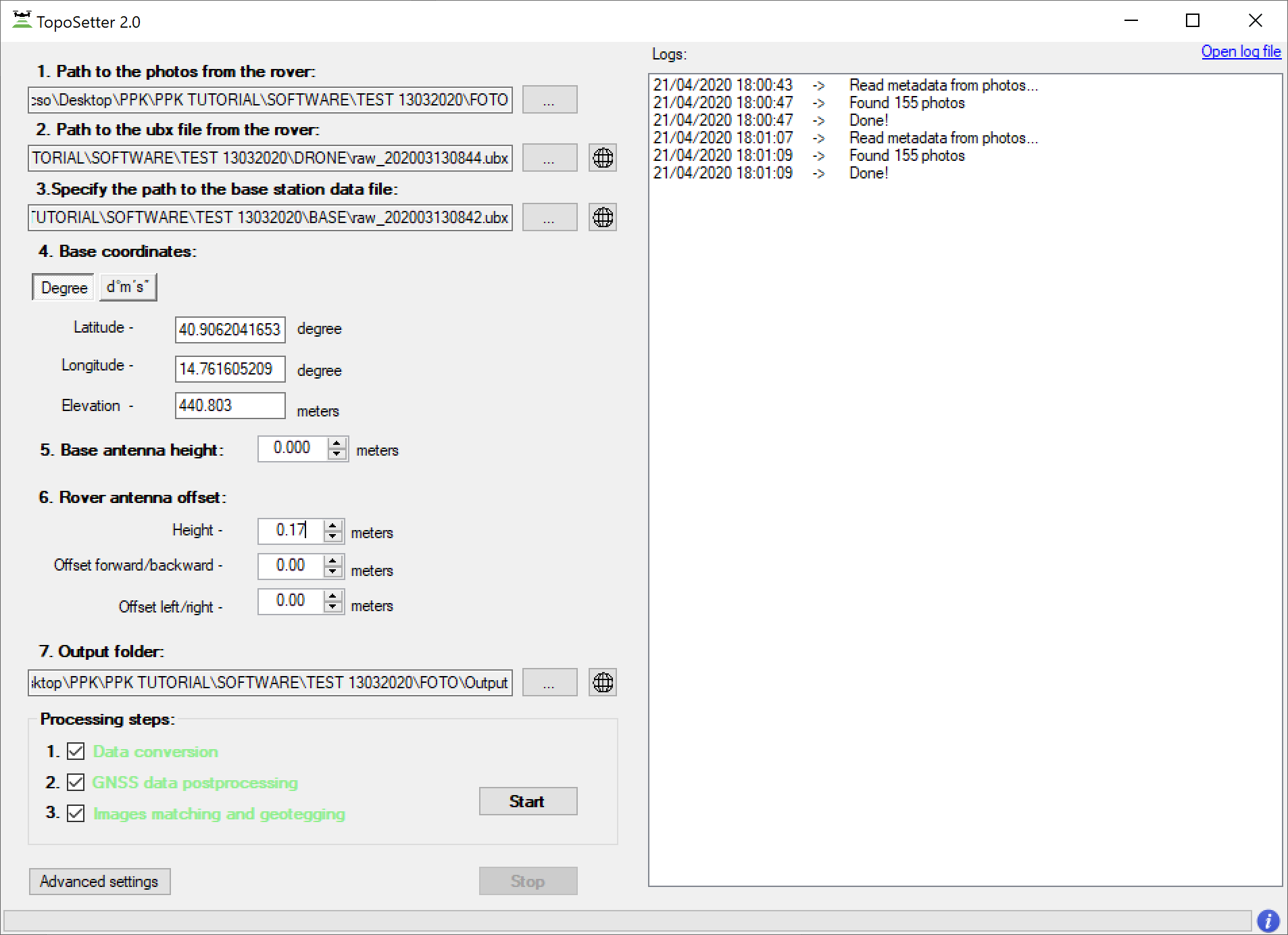
É importante notare come sia possibile anche scegliere le caratteristiche del file TXT contenente le coordinate corrette delle fotografie, ovvero in formato già settato per l’importazione in PIX4D oppure Agisoft Metashape, i due software più utilizzati nell’ambito della fotogrammetria professionale.
Altra peculiarità, al termine della creazione del file TXT è la possibilità di analizzare:
- La copertura del GNSS utilizzato come base a terra durante il volo.
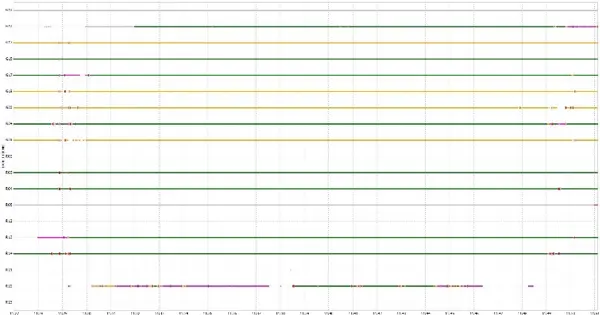
2. La copertura del GNSS utilizzato a bordo del drone durante il volo.
Ricostruzione 3D dell’oggetto del rilievo senza target
Per l’elaborazione delle immagini, Alessandro, ha optato per Agisoft Metashape, in quanto, ultizzandolo da sempre, è il software con il quale ha maggiore dimestichezza. Naturalmente per raggiungere lo scopo si potrà utilizzare qualsiasi altro prodotto di livello professionale (come ad esempio Pix4D, Bentley, Zephyr,…)
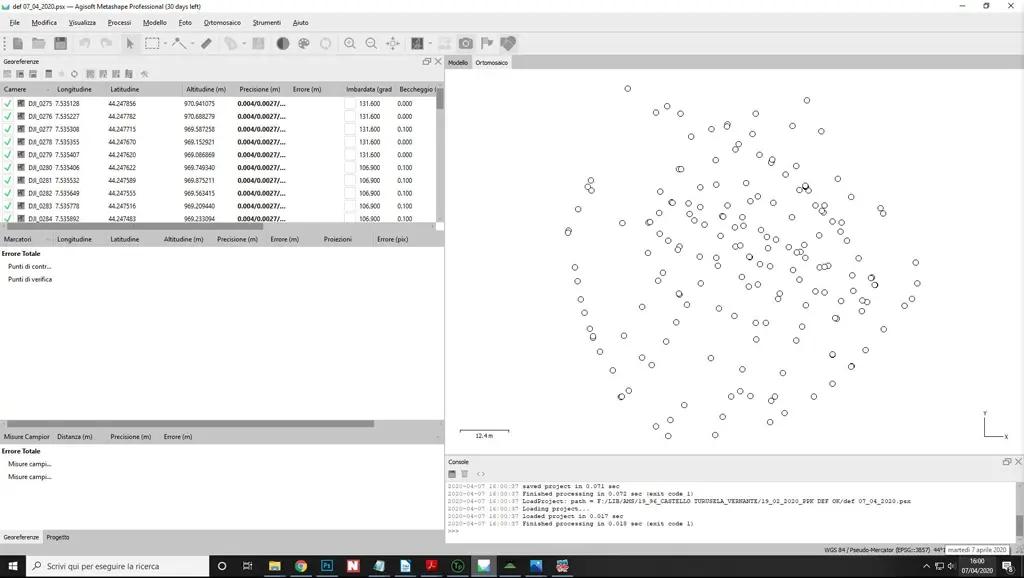
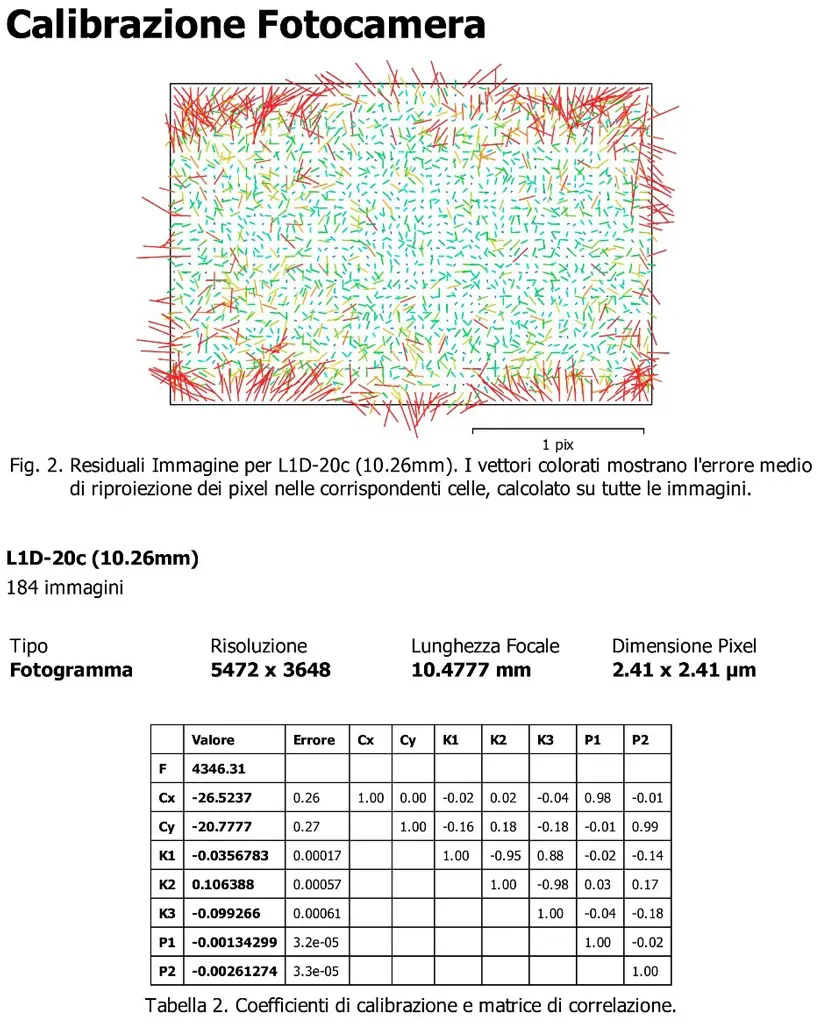
Dopo aver caricato le fotografie in Metashape abbiamo associato, nel pannello reference, il file TXT precedentemente creato e contenente le posizioni corrette delle prese fotogrammetriche. Calibrazione della camera con i parametri specifici forniti dal produttore del drone e allineamento dei singoli fotogrammi.
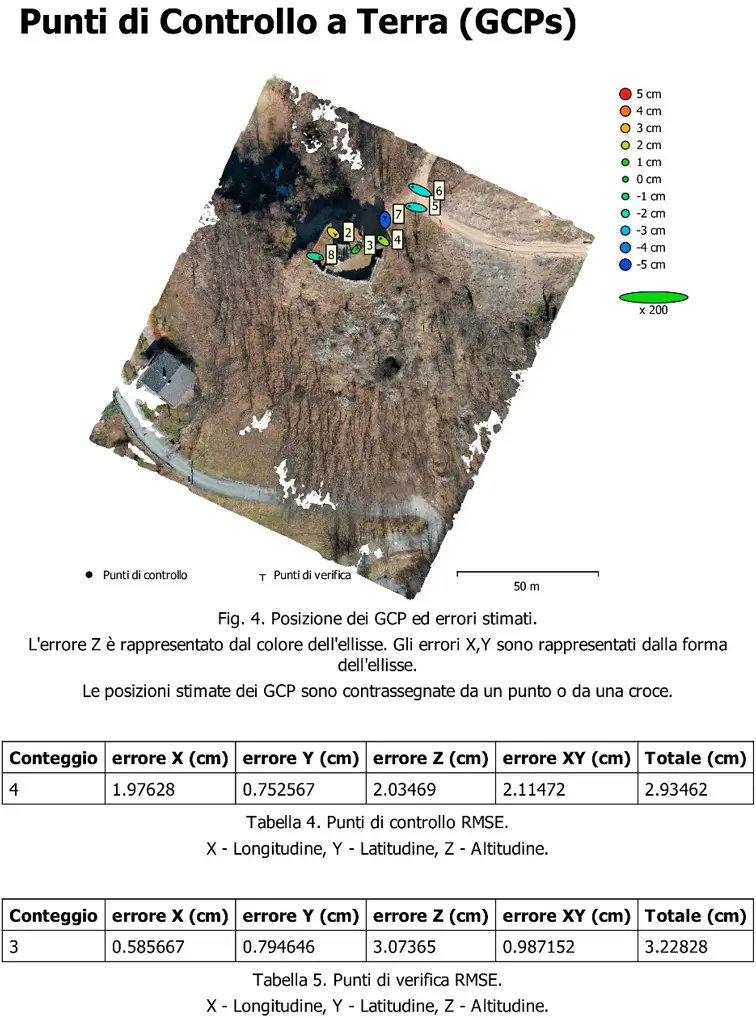
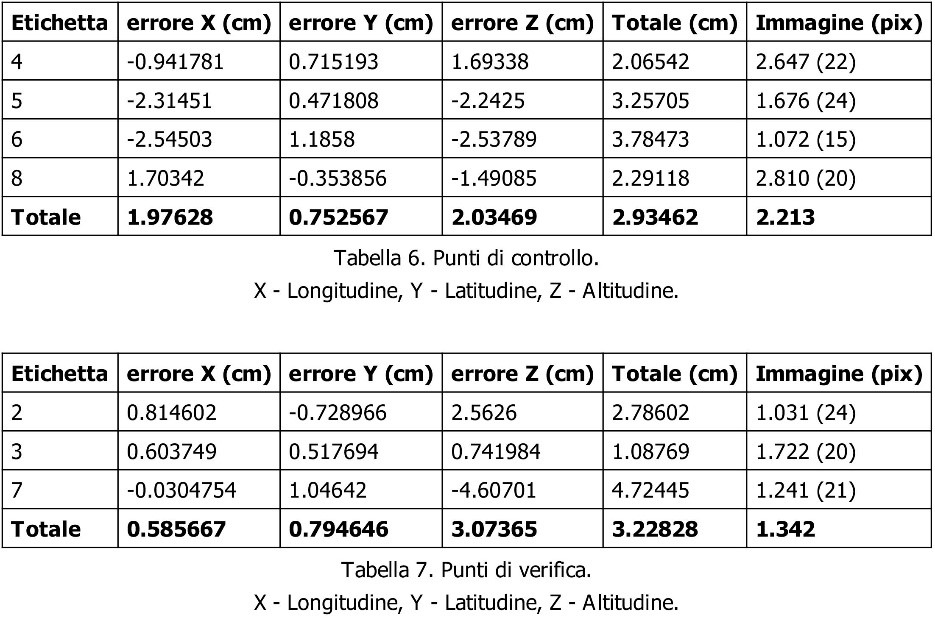
Al termine dell’allineamento si è provveduto alla importazione del file TXT contenente le coordinate dei GCP rilevati con il sistema GNSS Emlid Reach RS2 al fine di verificare l’accuratezza del rilievo effettuato con il sistema PPK di cui è dotato il nostro DJI Mavic 2 Pro.
Di seguito le fasi descritte:
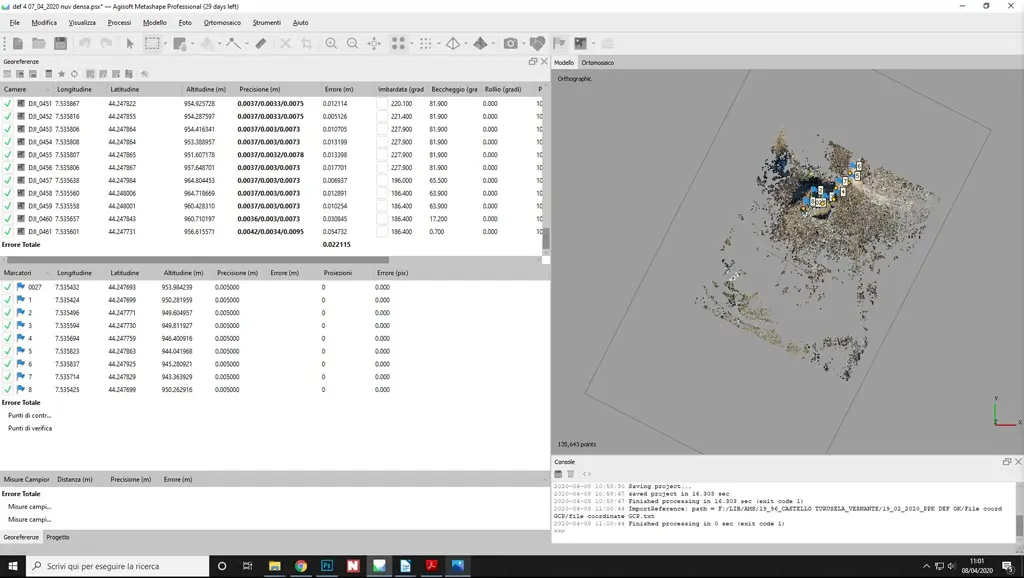
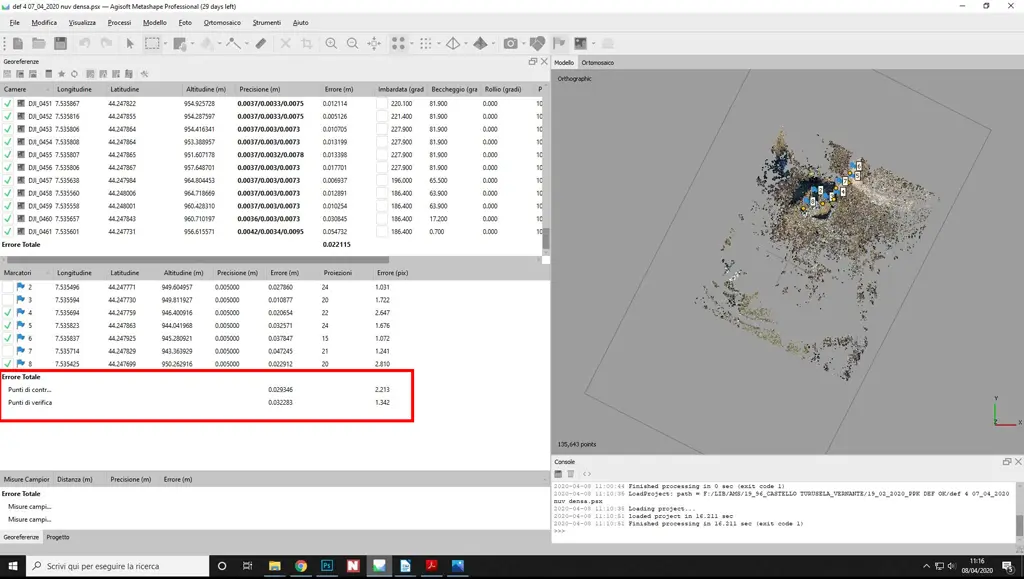
Dalla tabella dei marcatori, visibile nell’immagine precedente, si può evincere che il rilievo descritto nella presente procedura risulta centimetricamente corretto. Vediamo perchè:
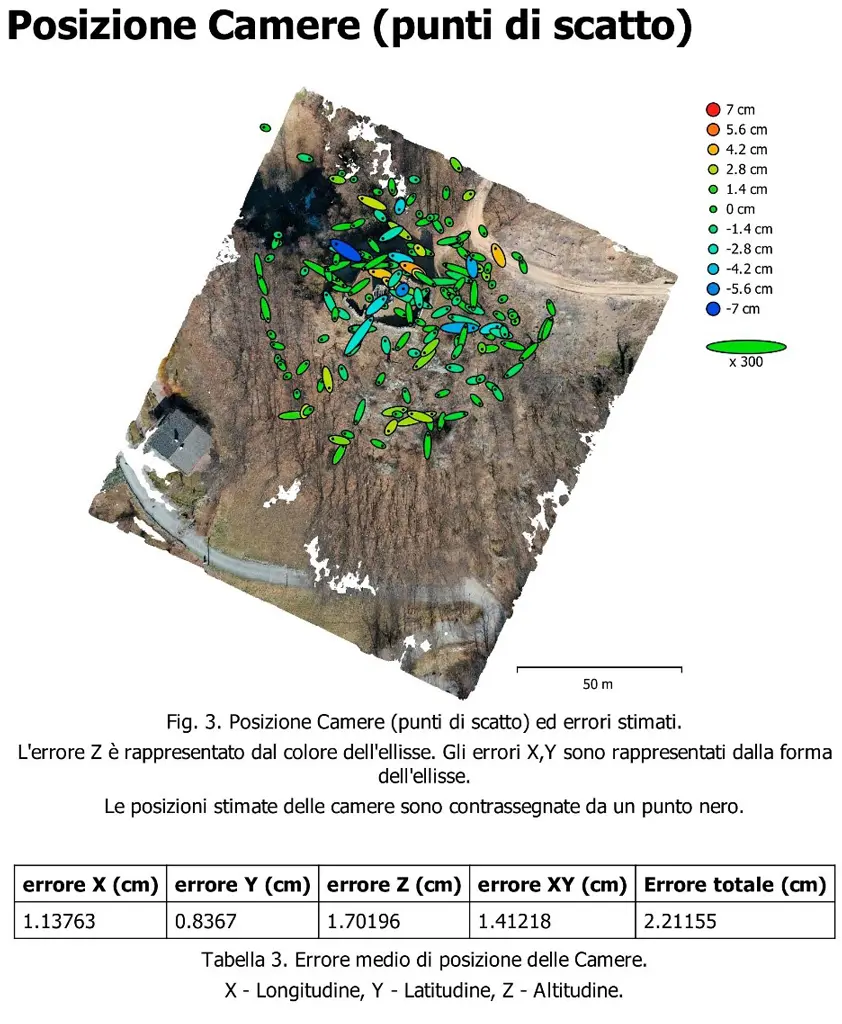
Innanzitutto si può notare che la precisione del rilievo PPK risulta di metri 0,0022115.
Nonostante rappresenti un valore notevole, non risulta essere il più rappresentativo.
Per verificare la correttezza del rilievo, infatti, è necessario far riferimento ai valori relativi ai marcatori.
Nella tabella sopramenzionata, infatti, è possibile verificare direttamente la precisione ottenuta sui punti di controllo che è pari a 0,032283.
Tale risultato, considerata la strumentazione usata e l’investimento effettuato, risulta assai vantaggioso in quanto crea opportunità di lavoro che precedentemente erano appannaggio di grosse società di ingegneria che potevano noleggiare e comprare macchinari ed attrezzature molto costose come elicotteri, aerei con sistemi aerofotogrammetrici di stereoscopia e telerileamento dai costi proibitivi, che però consentivano di accedere ad incarichi di rilievo estremamente redditizi.
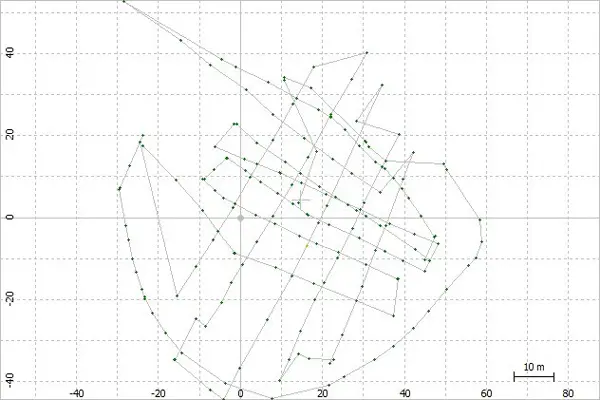
A integrazione delle considerazioni espresse si allegano alcuni schemi elaborati dal programma di Structure from Motion Agisoft Metashape, al fine di valutare scientificamente e graficamente, l’accurattezza del rilievo effettuato.
>
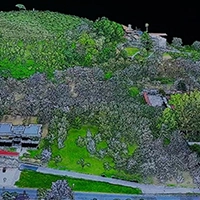
Per soddisfare le richieste della committenza si è proceduto successivamente alla generazione della nuvola densa e delle mesh del modello 3D.
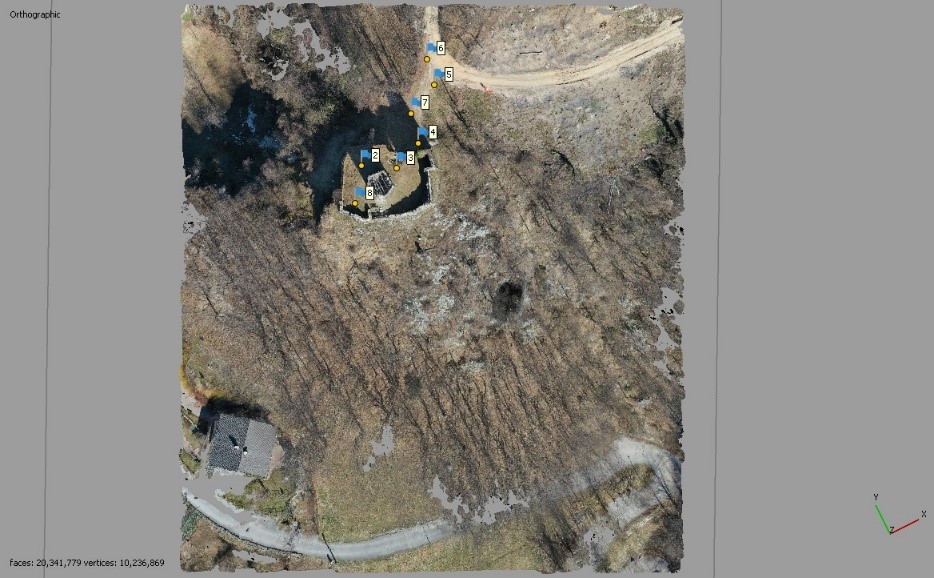
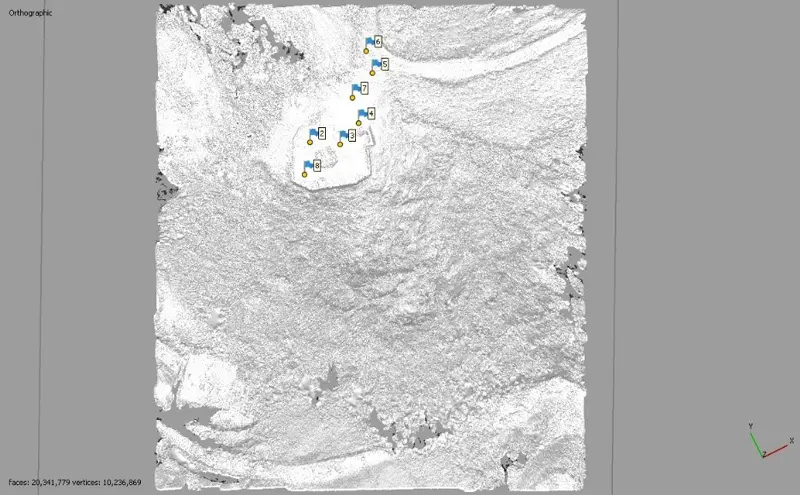
Lo step successivo è stato la texturizzazione del modello e la creazione dell’ortofoto. Lavoro propedeutico alla realizzazione dei disegni architettonici al tratto. Di seguito alcuni esempi:
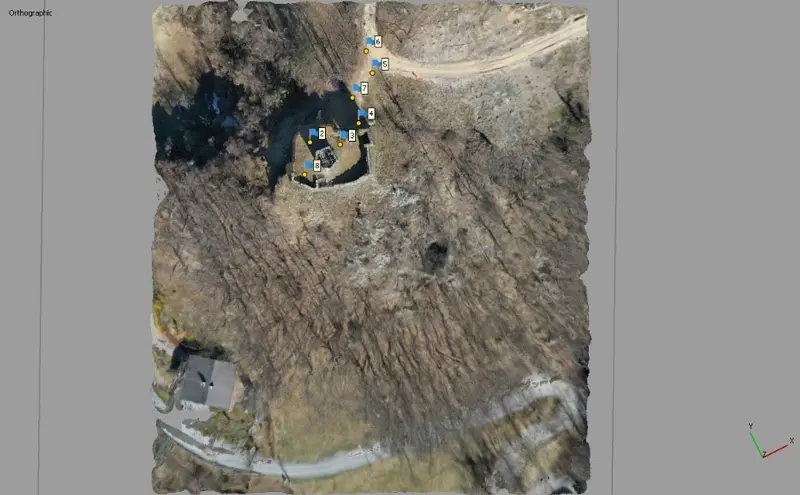




Particolare del modello tridimensionale texturizzato delle mura del castello. Si può evincere la tessitura muraria e l’estensione delle lesioni strutturali misurabili centimetricamente.
Infine la generazione del DTM, elaborato richiesto dalla committenza al fine di valutare l’andamento plano-altimetrico del terreno perimetrale al castello
Per la fase finale si è scelto di esportare la nuvola di punti georeferita in formato .las e si è utilizzato il software Topografo per allestire elaborati grafici al tratto bidimensionali, piante, sezioni e prospetti utili alla realizzazione delle tavole grafiche necessarie per la presentazione dei progetti architettonici e strutturali esecutivi.
Conclusioni:
Il presente esempio di metodologia di rilievo aerofotogrammetrico e ricostruzione tridimensionale, dimostra come, mediante la realizzazione di aerofotogrammetria con APR semiprofessionale (drone ad uso lavorativo), strumentazione topografica d’appoggio, GNSS, stazione totale e programmi specifici, sia possibile rilevare e ricostruire un manufatto esistente, con una buona precisione, circa da 2 a 5 cm, a seconda della metodologia applicata e dalle richieste della committenza, in tempi rapidi e avendo, inoltre, la possibilità di accedere e rilevare porzioni di manufatti e territorio morfologicamente inaccessibili o pericolosi, (come fronti di pendii soggetti frane e fabbricati pericolanti).
Come abbiamo già visto, il vantaggio più grande ed evidente di tale tecnologia è la possibilità di accedere ad incarichi che in passato erano riservati a studi professionali e società di ingegneria di caratura internazionale ed in possesso di strumentazione di livello; inoltre mediante le presenti metodologie di rilievo, si possono realizzare lavori ed elaborate, fino a qualche tempo fa, non realizzabili per complessità e peculiarità del lavoro.