
La tecnologia GNSS per la realizzazione di reti di inquadramento
Le reti di inquadramento GNSS richiedono precisione, corretta scelta dei punti e controllo delle baseline. L’articolo spiega perché il post-processing è fondamentale quando servono accuratezze elevate.
In questo articolo
- Caricamento indice…
Il posizionamento GNSS viene ad oggi utilizzato in diversi campi applicativi, caratterizzati da precisioni e accuratezze diverse. Saper scegliere tra diverse tipologie di hardware, diverse modalità di rilievo, diverse modalità di elaborazione, è una condizione necessaria per utilizzare al meglio una tecnologia che ormai è sul mercato da alcune decine di anni e come tale è per lo più consolidata.
I principi di funzionamento sono noti e anche da un punto di vista dell’hardware non c’è più molto spazio per l’innovazione. La differenza tra un rilievo ben riuscito e uno meno riuscito ad oggi la fa per lo più l’operatore. Intanto nella definizione dello strumento più adatto, poi nella scelta della tecnica di rilievo, infine nella capacità di interpretare correttamente i risultati.
In questo contesto possiamo distinguere diverse tipologie di rilievi in funzione delle precisioni richieste.
Vi sono i rilievi per applicazioni “GIS”; quei rilievi in cui si tratta di censire elementi sul territorio per generare o popolare database geografici, che generalmente richiedono precisioni dell’ordine del metro.
Vi sono quelli per applicazioni topografiche, come ad esempio rilievi in ambito catastale, appoggi topografici per altre tecniche di rilievo. In questo caso si parla di precisioni dell’ordine di qualche centimetro e generalmente, salvo casi particolari, viene utilizzato un approccio RTK o NRTK.
Vi sono infine i rilievi per cui sono richieste precisioni più spinte, intorno al centimetro o addirittura sotto. Questo è il caso che si vuole approfondire in questo articolo.
Fatto salvo che la gran parte dei rilievi GNSS sono ad oggi realizzati in modalità NRTK, per particolari applicazioni in cui siano richieste precisioni e accuratezze spinte, occorre giocoforza effettuare rilievi in post processamento (PP). È il caso, ad esempio, delle reti di inquadramento, in cui la tecnologia GNSS porta grande vantaggio poiché consente di definire le coordinate di punti che creano una rete di inquadramento anche ampia, senza che sia necessaria intervisibilità tra gli stessi. Le precisioni e le accuratezze richieste per una rete di inquadramento sono in genere piuttosto spinte, in ragione del fatto che tali reti sono utilizzate come punto di partenza per rilievi di dettaglio. L’accuratezza del posizionamento di ogni nodo della rete si ripercuote, poi, sull’intero rilievo di dettaglio.
Differenza tra un rilievo in NRTK e in PP
Intanto è importante comprendere la differenza tra un rilievo in RTK ed un rilievo in PP. Nel primo caso le osservabili del rover vengono elaborate direttamente in campo all’interno del software che risiede sul controller, il quale riceve, sempre in campo ed in tempo reale, le cosiddette correzioni differenziali da un servizio esterno. Risultato di tale approccio è che, in tempo reale, si ottengono le soluzioni al problema. In altre parole si determinano le coordinate del punto su cui il rover è posizionato.
Nel caso di un rilievo in PP i dati che vengono archiviati in campo sono proprio le osservabili, siano esse della base o dei rover. Tali osservabili, unitamente ad una serie di informazioni accessorie (es: file navigazionali) vengono utilizzate all’interno dei software di elaborazione proprio per risolvere il sistema e determinare le coordinate del punto (o dei punti) battuti.
In linea di principio quindi non cambia molto. Sia in tempo reale che in Post Processing, osservabili di base e rover vengono combinate e/o differenziate per eliminare effetti di disturbo comune e ottenere un posizionamento con le precisioni richieste. La differenza sostanziale sta nei tempi e nei modi. Nel rilievo in tempo reale tutto viene fatto direttamente in campo, con tempi di stazionamento molto brevi. Nel rilievo in PP i tempi di stazionamento richiesti sono più lunghi e la soluzione non viene generata in campo.
Inoltre, nel primo caso vengono registrate le soluzioni (terne di coordinate) ma solitamente non si archiviano i dati grezzi, nel secondo caso, invece, l’unica informazione che si archivia sono appunto i dati grezzi.
Come impatta tutto ciò in termini di precisione e accuratezza?
In un rilievo in NRTK eventuali outlier, disturbi locali o altri effetti che degradano la precisione della misura dell’osservabile non sono più trattabili. Una volta determinata la terna di coordinate non ci sono ulteriori possibilità di migliorare il posizionamento. Sia che si tratti di errori casuali, sia che si tratti di qualche errore di modello non c’è modo di correggere alcunché.
In un rilievo in PP, avendo a disposizione i dati grezzi, è possibile effettuare più elaborazioni, dopo avere analizzato con attenzione tutte le osservabili. In questo modo è possibile, ad esempio, scegliere le osservabili migliori, decidere se eliminarne alcune dal processamento e applicare diversi modelli per mitigare alcuni effetti. Tutto questo, sia in termini di precisione, sia di accuratezza, garantisce un maggiore controllo sul risultato finale. Inoltre, la possibilità di avere una maggiore ridondanza temporale di informazioni, effettuando rilievi lunghi, consente di ridurre al minimo il rumore delle misure o di isolare più facilmente eventuali outlier.
Il progetto e il disegno della rete di inquadramento
Una rete di inquadramento si pone l’obiettivo di fissare le coordinate di punti a cui appoggiarsi per il rilievo di dettaglio successivo. In questo senso si tratta dapprima di definire la posizione dei punti, proprio in funzione del rilievo di dettaglio successivo, ma anche in funzione del fatto che, se l’inquadramento viene realizzato con ricevitori GNSS, occorre individuare delle posizioni che siano consone da un punto di vista della visibilità satellitare e della presenza di fonti di disturbo (es: superfici riflettenti)
Una volta definita la posizione, si tratta di decidere durata del rilievo e disegno delle baseline.
Riguardo alla durata del rilievo si tenga invece presente che, evidentemente, quanto più lungo è lo stazionamento, tanto più l’elaborazione successiva potrà consentire di raggiungere accuratezze spinte. Assumendo che per applicazioni di questo tipo possano essere richieste accuratezze dell’ordine del centimetro o poco meno, è chiaro che in questo senso occorre trovare un compromesso tra precisioni richieste e durata del rilievo. Indicativamente uno stazionamento con ricevitori doppia frequenza- in casi di questo tipo- non può durare meno di 20 minuti. Ma non di rado ci si deve spingere a stazionamenti nell’ordine delle ore.
In tutto ciò realmente gioca anche l’esperienza dell’operatore, che facendo un bilancio tra tipo di ricevitore, visibilità satellitare sul punto, lunghezza delle baseline, riesce a individuare una durata consona.
Vi è poi da considerare il progetto e il disegno della rete. Nei limiti del possibile, considerando evidentemente la geometria dell’area oggetto di studio, occorre progettare la rete definendo la posizione dei punti in modo che i lati della rete di inquadramento siano il più possibile della medesima lunghezza. Si tratta di disegnare una rete i cui punti siano vertici di triangoli il più possibile equilateri ed equiangoli.
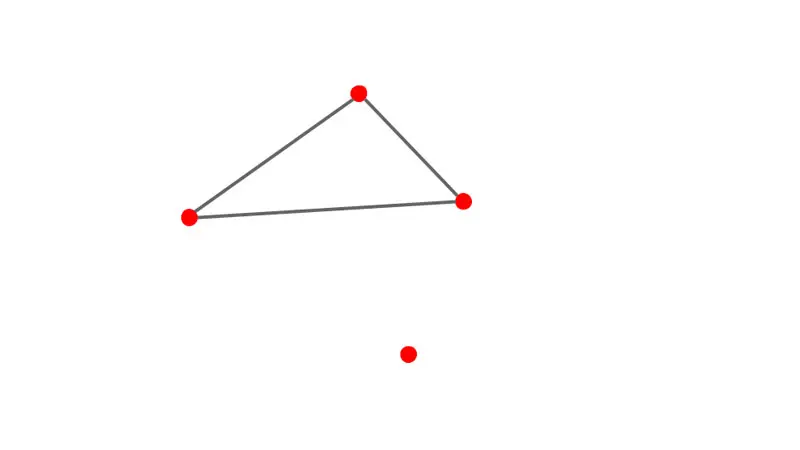
In una rete così composta vanno identificate le baseline indipendenti, che sono in numero pari a n-1, dove n è pari al numero dei punti. Un insieme di baseline indipendenti comprende tutte le baseline che non sono definibili come una combinazione lineare di altre baseline appartenenti al medesimo insieme. Per fare un esempio concreto, in un triangolo composto da tre vertici e tre lati, le baseline indipendenti sono 2 (qualsiasi) poiché la terza è ricavabile come differenza vettoriale tra le due indipendenti. Nella figura seguente si riporta un esempio con 4 vertici in cui si debbono scegliere opportunamente le 3 baseline indipendenti.
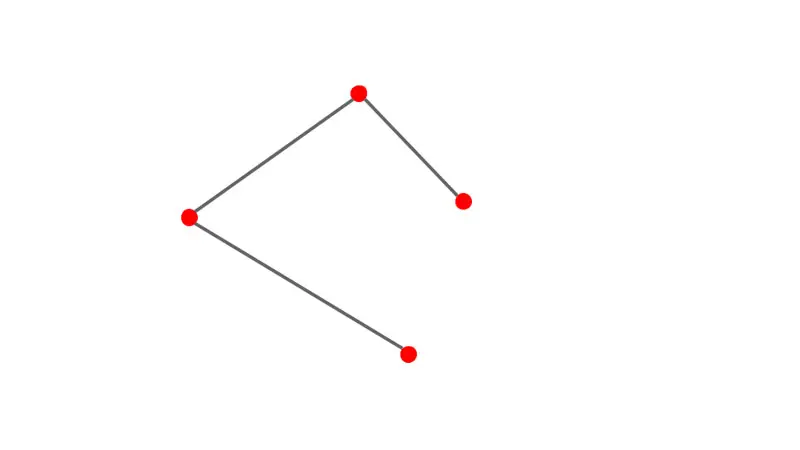
L’identificazione delle baseline indipendenti è necessario perché tali baseline possono essere elaborate in una singola sessione identificando un intervallo di tempo. Un eventuale altro set di baseline, tra loro indipendenti, può essere elaborato in una seconda sessione che copra un intervallo di tempo di acquisizione diverso dalla prima.
Così facendo vengono determinate le componenti tridimensionali di un numero di baseline ridondante rispetto allo stretto necessario. In questo modo è possibile quindi effettuare la compensazione di rete, con la quale gli errori commessi nella stima delle componenti delle baseline vengono “re-distribuiti” sull’intera rete e vengono così determinate le coordinate compensate di tutti i vertici, a partire da uno o più punti di coordinate note.
Potrebbero interessarti...

FJD Trion P2: cosa cambia con il firmware V1.2.0
Il firmware V1.2.0 di FJD Trion P2 introduce nuove funzioni per migliorare scansione, gestione del rover, foto integrate, punti di controllo e rilievi estesi. L’articolo anali…
Leggi di più
Scansione 3D georeferenziata: come lavorano insieme GNSS RTK e LiDAR
La scansione 3D georeferenziata unisce GNSS RTK e LiDAR per ottenere nuvole di punti già posizionate nel mondo reale. L’articolo spiega come lavorano insieme, quali vantaggi …
Leggi di più
Rilievo 3D professionale: perché le misure contano più del colore
Nel rilievo 3D una nuvola di punti colorata non è sempre la scelta migliore. L’articolo spiega quando il colore può rallentare scansione, elaborazione e consegna, e perché …
Leggi di più