









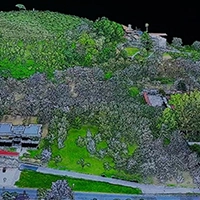









Da qualche tempo, la Fotogrammetria sta affiancando sempre di più i Topografi nella gestione dei rilievi di terreni, cave, discariche e, più di recente, grazie alla spinta trainante degli incentivi 110%, anche delle facciate degli edifici. Spesso però la problematica di effettuare un rilievo tradizionale fotogrammetrico è data dal fatto che, per georeferire e scalare correttamente la “nuvola di punti”, bisogna posizionare a terra dei “GCP” o Target che vanno rilevati, con GNSS o Stazione Totale, prima di eseguire il volo con il drone.
Il posizionamento dei target, che è fondamentale, presenta però degli svantaggi che, chi ha già avuto a che fare con la Fotogrammetria, conosce molto bene.
Anzitutto il posizionamento . Non è escluso infatti che il rilievo sia da eseguire in un territorio complesso; complessità dovuta, ad esempio, a vegetazione, pareti rocciose o altro.
Altro svantaggio da menzionare è che i target vanno fissati a terra in maniera che non vengano spostati dal vento o, peggio, da qualche curioso di passaggio. Spesso si preferisce, ove possibile, disegnarli a terra con vernici lavabili (da preferire sempre colori ben visibili dall’alto). È sempre buona norma numerare i target che si posizionano e scattare fotografie sul posto per ognuno di essi, più informazioni si hanno del lavoro eseguito sul campo e meglio è. Sempre tra gli svantaggi va ricordato che se i target posizionati sono di materiale plastico, e quindi non biodegradabile, vanno recuperati alla fine del rilievo.

Avere una tecnologia RTK/PPK a bordo drone è sicuramente un vantaggio quindi in termini di tempo perché si evita di dover mettere a terra, rilevare e successivamente recuperare i target. Inoltre, se tutto funziona, una volta in ufficio, si evita la fase lunga e noiosa di associazione della terna di coordinate rilevate con il GNSS ai corrispettivi target presenti nelle fotografie che ha scattato il drone.
Ovviamente, come menzionato prima, tutto deve funzionare. Più avanti, in questo articolo, è visibile una tabella comparativa di quello che è necessario per affrontare un rilievo fotogrammetrico sia che si abbia a disposizione un drone con tecnologia RTK/PPK a bordo che uno senza.
RTK e PPK
Prima di parlare di RTK, va capito come funzionano i metodi di posizionamento. Senza voler essere tediosi, basti pensare che l’intero metodo di posizionamento GNSS si basa sulla misurazione del tempo che impiega un segnale per viaggiare dal satellite al ricevitore. Con le orbite precise (effemeridi) e i tempi di viaggio del segnale di almeno quattro satelliti, si potrà individuare prima l’area e poi la posizione esatta (incrocio delle quattro sfere) che si sta occupando in quel momento sul pianeta Terra.
Ma quanto è accurata la posizione trovata dal metodo descritto prima? Questo dipende dal ricevitore GNSS o GPS che si utilizza. Quello che si trova a bordo di auto o negli smartphone, ad esempio, ha una accuratezza tra i 2-4 metri. Sicuramente sufficienti per la navigazione, quindi cercare una strada, un negozio o inviare una posizione a chi ci deve raggiungere, ma non soddisfacente per chi, come un topografo, deve determinare con accuratezza centimetrica le informazioni sul territorio.
Perchè la posizione derivante dai calcoli fatti prima non riesce ad essere centimetrica? Per capirlo bisogna fare qualche conto.
Il segnale che arriva al ricevitore dal satellite percorre circa 20.200 km (ventimiladuecento). In questo suo percorso, attraversa la ionosfera (che lo rallenta) e poi l’atmosfera (dove potrebbe trovare le nuvole) ed inoltre, sul suo cammino, potrà anche trovare ostacoli come quelli di madre natura o artificiali come quelli costruiti dall’uomo. Tutti questi fattori influiscono sul tempo di viaggio e quindi sull’errore della posizione.
L’RTK è quella tecnica che consente di abbassare (non di eliminare) questo errore ma presuppone l’utilizzo di due ricevitori, uno detto “base” e uno detto “rover”. Come intuibile, la “base” starà ferma in un punto con coordinate note mentre il “rover” sarà in movimento. Ovviamente tutti e due i GNSS osserveranno gli stessi satelliti e, partendo dal punto noto della base, sarà possibile ricavare accuratezze centimetriche per il rover.
Anche con una sola unità GNSS si può lavorare in RTK. Si avrà bisogno sempre delle correzioni di base che potranno essere ricevute in NTRIP (internet) dai servizi presenti sul territorio (Italpos, SPIN GNSS, per citarne alcuni). Questa modalità di lavoro in RTK risulta essere quella più veloce perché un solo operatore è sufficiente e il costo di acquisto è limitato ad un solo ricevitore. Il limite deriva dal fatto che, per funzionare, necessiti di copertura internet. Va da se, quindi, che non è utilizzabile in quelle zone dove c’è assenza di rete. Ovviare alla mancanza di internet è possibile, o tornando alla modalità doppio ricevitore oppure post-processando il dato grezzo (PPK).
Il funzionamento in PPK è pressappoco simile all’RTK. La differenza sta nel fatto che base e rover non sono in comunicazione tra loro. Ognuno di essi registra un file grezzo detto Rinex. I due file registrati da base e rover vengono successivamente elaborati da un software specifico una volta tornati in ufficio. Per inciso si ricorda che la modalità PPK garantisce risultati più accurati rispetto all’RTK lasciando inoltre l’utente libero di gestire molti più parametri del rilievo come tipo di costellazione da utilizzare e molto altro.
I droni RTK/PPK
Non c’è nulla di diverso dal funzionamento sopra descritto. Il drone sarà il rover, la base la faranno i servizi territoriali o un GNSS posizionato su coordinate note. Il limite resta sempre la copertura internet.
In realtà, oltre alla rete, un altro limite è dettato dalla comunicazione tra radiocomando e drone.
In caso di RTK, è infatti il radiocomando ad essere connesso ad internet e a passare i dati al drone che è in volo. È sul drone ovviamente che viene installato il GNSS di precisione e quest’ultimo, come logico sia, si occupa di osservare i satelliti, ma è il radiocomando ad avere connessione ad internet (mediante una Wi-Fi o modem interno). Al radiocomando arrivano quindi le correzioni di base che vengono trasmesse al drone (rover). Finche tra drone e radiocomando c’è visibilità, la modalità RTK è garantita; nel momento in cui questa non dovesse esserci, bisognerà post-processare il file grezzo (rinex) che si troverà nella cartella delle foto scattate dal drone.
Ora è più facile intuire per quale motivo questi sistemi si chiamino RTK/PPK. Nel momento in cui il drone non riceve più correzioni, continuerà la missione di volo preimpostata scattando tutte le foto previste. Una volta atterrato il drone, si troveranno sulla scheda SD, le fotografie unitamente ad un file *.rinex. In quest’ultimo, si troverà registrato tutto il percorso del drone. Con questi dati si passa a post-processare il dato. Ovviamente ciò che manca è il file dell’osservazione della base (osservazione che può essere scaricata dal sito delle basi fisse presenti sul territorio o dalla base GNSS proprietaria).
I Target o GCP, sfatiamo un mito
Da quando si parla di droni con sistemi RTK/PPK a bordo, le pubblicità delle varie case costruttrici di tali mezzi puntano sul fatto che il vantaggio è quello di non mettere più target a terra. Non ci si lasci ingannare da questa informazione. È sicuramente vero che il numero di target da posizionare, rilevare e recuperare è nettamente inferiore rispetto a quelli necessari per un volo tradizionale ma sicuramente non ci si può esimere, utilizzando un drone dotato di RTK/PPK, dal posizionarne un numero sufficiente per poter valutare l’accuratezza del rilievo eseguito. Non posizionando a terra alcun target si dovrà obbligatoriamente fare affidamento sui dati che sono stati calcolati dal drone in RTK (se connesso alle correzioni) o in PPK (se non lo era). È buona norma posizionare a terra 2/3 target che verranno utilizzati esclusivamente a valle della creazione della nuvola sparsa per poterli utilizzare, nel software SFM che si sta utilizzando, solo come “Check-Point” e non come “Control Point”. I GCP rilevati non partecipano quindi alla georeferenziazione della nuvola di punti o, per chi è più addentro alla materia fotogrammetrica, non partecipano all’orientamento esterno nella sparse cloud.
Tabella comparativa
Si è voluta creare una piccola tabella riassuntiva che faccia capire, al di la delle differenze hardware tra i due droni, di cosa si ha bisogno per eseguire un rilievo fotogrammetrico se sceglie di utilizzare un drone normale piuttosto che uno “dopato” con RTK.
Le differenze sono fatte su due droni conosciuti ai più. DJI Phantom 4 Pro V.2 e DJI Phantom 4 RTK.
Differenze in campo, cosa è necessario e cosa non lo è, per i due diversi droni quando sono in campo:
|
DJI Phantom 4 Pro V.2 |
DJI Phantom 4 RTK |
|
|
GNSS/Stazione Totale per raccolta GCP a terra |
SI |
SI (ma solo per controllo) |
|
Target/Bomboletta Spray |
SI | SI |
|
Connessione a internet |
1. Facoltativa per il Drone 2. Necessaria per il GNSS (se si usa in modalità rover) |
1. Necessaria per il drone se si vuole lavorare in RTK 2. Necessaria per il GNSS (se si usa in modalità rover) |
|
Software/App per missione di volo |
SI | SI |
Differenze in ufficio, cosa cambia una volta che si è finito di rilevare in campo:
|
Software SFM (Metashape, Pix4D, Zephyr…) |
SI (nel caso si utilizzi Metashape va bene anche la versione standard*) |
SI (nel caso si utilizzi Metashape si consiglia vivamente la versione Professional ) |
|
Software Topografico |
SI (nel caso si voglia ottenere elaborati come Profili, Sezioni, Curve di Livello o altro…) |
SI (nel caso si voglia ottenere elaborati come Profili, Sezioni, Curve di Livello o altro…) |
Come si può notare, in buona sostanza, le attrezzature, sia hardware che software, da avere a disposizione sono praticamente identiche sia nel caso si utilizzi un Phantom 4 Pro V.2, sia nel caso si utilizzi la versione RTK.
Il parametro che si può considerare come discriminante è sicuramente la velocità, sia in fase di esecuzione del rilievo, sia in fase di elaborazione dati in ufficio. Sul campo, la tranquillità di non dover obbligatoriamente posizionare tutti i target necessari con un rilievo di tipo tradizionale (e di doverli recuperare a fine rilievo) e in ufficio, il non dover confermare la terna di coordinate rilevate con GNSS/Stazione Totale per tutti i marker posizionati in fase di rilievo (e su tutte le foto che li contengono), fanno del Phantom 4 RTK, e di tutti i droni che adottano questo sistema, il vincitore di questo confronto e sarà la scelta giusta per tutti coloro che operano in zone dove, a causa dell’orografia del territorio, sarebbe complesso e, a volte, anche pericoloso per l’operatore, posizionare e rilevare i famosi GCP.
Un aspetto di cui si dovrà però tenere conto è quello della connessione ad internet. Se questa viene a mancare, nel caso si colleghi il drone ai sistemi di correzione NTRIP, il volo verrà eseguito in modalità PPK e questo, al ritorno in ufficio, sarà sicuramente un rallentamento notevole del flusso di lavoro (contando anche che si debba essere a conoscenza di come funzionano i software per il post-processo dei dati).
La scelta del tipo di drone da utilizzare alla fine spetta sempre al tecnico incaricato del rilievo. Solo lui può sapere, in quel determinato caso, cosa è o sarebbe meglio utilizzare. Certamente il metodo fotogrammetrico tradizionale consente di portare sempre a casa il lavoro e, parlando di budget da investire, quello per avere in casa un DJI Phantom 4 RTK è tre o forse quattro volte quello che serve per avere un Phantom normale. Purtroppo quest’ultimo, ad oggi, anche fuori produzione.