


















INDICE
Il LIDAR è una tecnica di rilievo attiva, che ha visto grande diffusione negli ultimi anni come tecnica utilizzabile da UAV. Si basa su di un sensore che emette un raggio laser, nel campo dell’ultravioletto, visibile o vicino infrarosso, con il quale viene misurata la distanza tra l’emettitore e il punto che riflette il raggio stesso. Il risultato è la creazione di una nuvola di punti da cui si deriva il modello 3D dell’oggetto rilevato.

Che cos’è il multiecho?
Il multiecho o multiritorno è una caratteristica tipica del laser scanner e del LIDAR.
Si basa sul principio secondo il quale il raggio laser, che è il segnale con cui appunto viene misurata la distanza tra l’emettitore e il punto rilevato, può essere interamente o solo parzialmente riflesso dalla superficie che incontra. Una riflessione parziale avviene in ragione di due effetti che coesistono:
-
L’incontro con una superficie discontinua, che contiene cosiddette breakline, spigoli, interruzioni
-
La dimensione dell’impronta del raggio, che non è esattamente puntuale ma generalmente circolare con un diametro misurabile, per quanto piccolo
Le discontinuità nella superficie che si sta rilevando sono evidentemente la condizione necessaria affinché il multiecho sia presente. Si pensi a spigoli di fabbricati o a chiome di alberi. In casi come questi, quando il raggio laser colpisce esattamente lo spigolo del fabbricato, accade che una porzione di raggio viene riflessa dalla parete ortogonale alla direzione del raggio, mentre una porzione prosegue oltre (Fig.1).
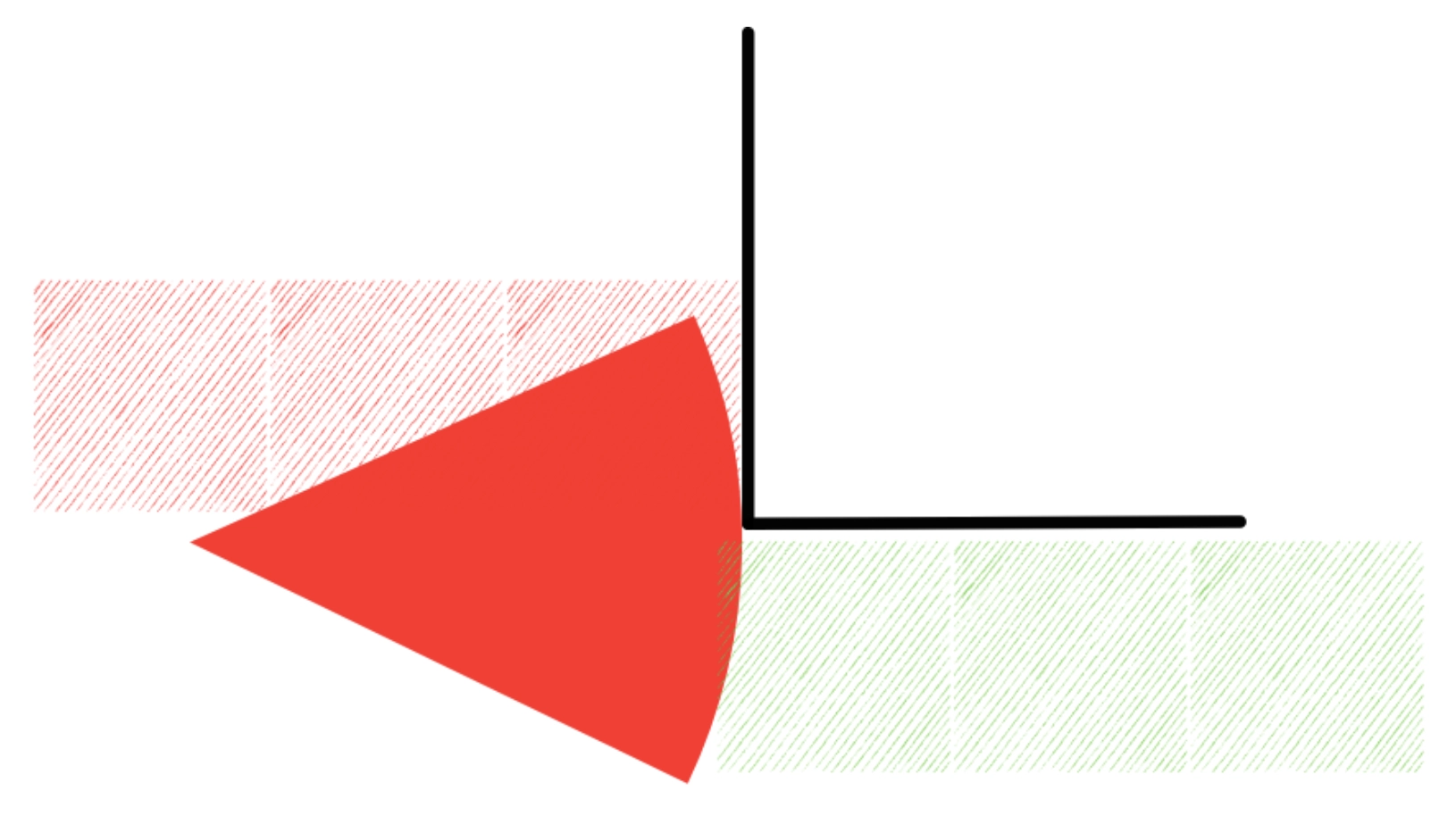
Fig. 1 – Schema della riflessione parziale del raggio
Il raggio laser ha un’impronta a terra che dipende dalla distanza dalla sorgente e dalla qualità del sensore. La cosiddetta divergenza del raggio da una misura di quanto l’impronta circolare del raggio aumenti di diametro all’aumentare della distanza tra il sensore e l’oggetto. Se da un lato tale caratteristica produce un maggiore rumore nelle misure, dall’altro garantisce che, laddove non vi sia una superficie continua, ci sia una buona probabilità di colpire linee di discontinuità e quindi di lasciare proseguire almeno parte del singolo raggio laser.
La componente di raggio laser che prosegue il proprio cammino, evidentemente potrà dare vita al medesimo fenomeno. Verrà incontrato nuovamente un ostacolo, che potrà riflettere totalmente o parzialmente la parte rimanente del raggio stesso. Così si prosegue fino a che l’intero segnale non viene riflesso.
In termini di ricezione tale comportamento si traduce in un segnale che a diverse distanze evidenzia un impulso. L’ampiezza dell’impulso è funzione della quantità di segnale riflesso. Lungo la verticale quindi, lungo il percorso che il singolo raggio compie, è possibile individuare più di un segnale di ritorno. Tutti questi segnali vengono “registrati” dal sensore, che quindi ad una singola coordinata associa la possibilità che vi siano più superfici e quindi più distanze da misurare (Fig. 2).
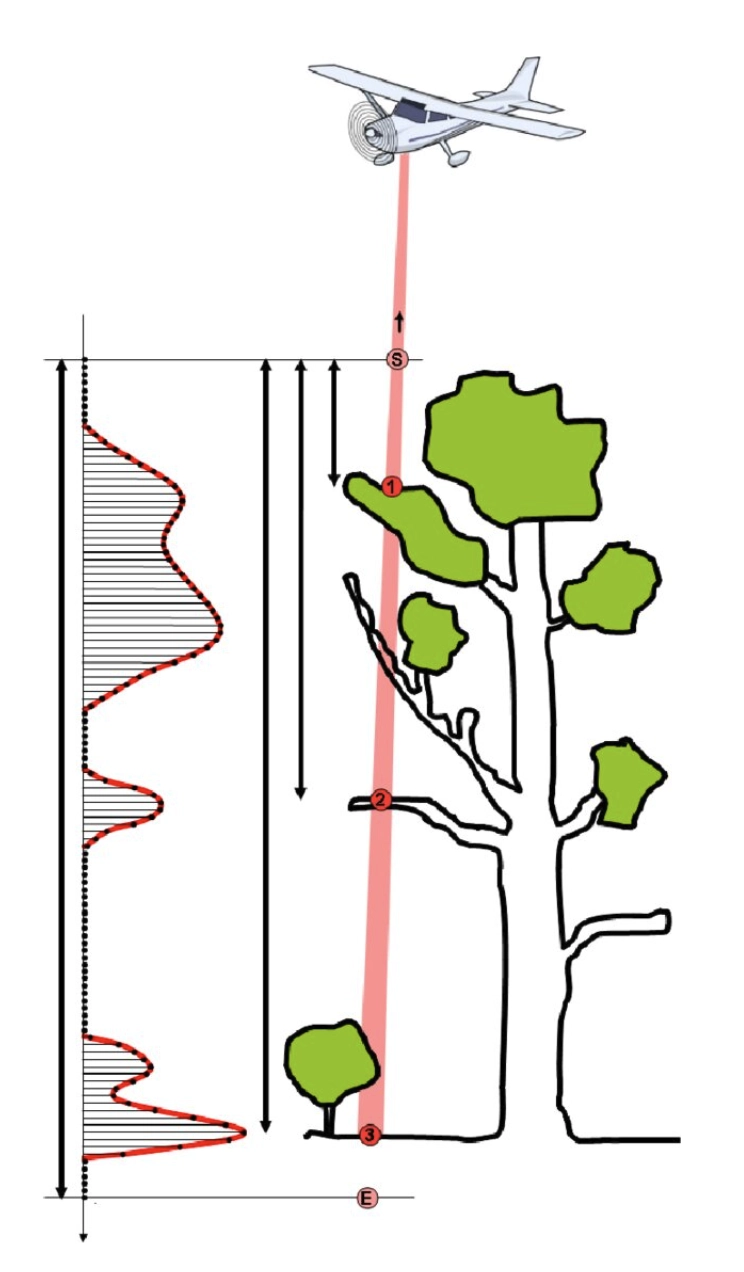
Fig.2 – Esempio di segnale in ricezione, in caso di multiritorno
Fonti: Brown, Rebecca. (2019). Data Quality Analysis of the Leica SPL100 Airborne Single Photon Lidar Sensor. 10.13140/RG.2.2.19444.09609.
A che cosa serve?
Il multiritorno, come descritto nel paragrafo precedente, fornisce una delle informazioni associate ad ogni terna di coordinate. In altre parole, nella tabella associata alle coordinate del punto, in un file di dati lidar, vi è una colonna in cui è indicato quale numero di “echo” sia associato a tale posizione. In termini “grafici”, ciò si traduce nella possibilità di distinguere diverse nuvole di punti a seconda dell'”echo”.
In genere, in questo caso, il primo ritorno è quello che caratterizza il maggior numero di punti.
Punti caratterizzati da echo=1 sono generalmente tutti quelli che non sono compresi nel terreno. È però altresì vero che pure nella classe del “primo echo” vi possono essere punti appartenenti al terreno o all’ultima superficie raggiungibile.
In altre parole ci sono molti punti che hanno un solo echo, e quindi per quel punto il primo echo è anche l’ultimo. Si pensi a punti sulla superficie stradale o su un tetto di una casa. In quel caso il raggio viene interamente riflesso dalla prima superficie che incontra, che è continua.
Clicca qui per scoprire il software DJI Terra
Le classi con il secondo, il terzo e i successivi ritorni sono in genere molto meno numerose. Questo intanto ci dice che la gran parte dei fasci laser sono interamente riflessi dalla prima superficie che incontrano.
Ci è poi utile a capire quali siano le aree in cui vi sono strutture che stanno sopra il terreno, in parte distaccate da esso. Si pensi quindi alla presenza di alberi, ma anche di strutture non continue come tralicci.
Dipende poi molto dall’area oggetto di rilievo. Se è vero che in ogni caso si avrà un maggior numero di punti con il solo primo ritorno e poi a seguire tutte le classi corrispondenti ai ritorni successivi, è pur vero che la numerosità e la distribuzione degli stessi dipende molto dal tipo di area che si sta rilevando.
È evidente che in caso di area urbana in cui ci sono solo strade ed edifici, la gran parte dei punti avrà un solo ritorno. In un’area molto vegetata, saranno molti i punti che abbiano almeno 3 o più ritorni (Fig. 3).
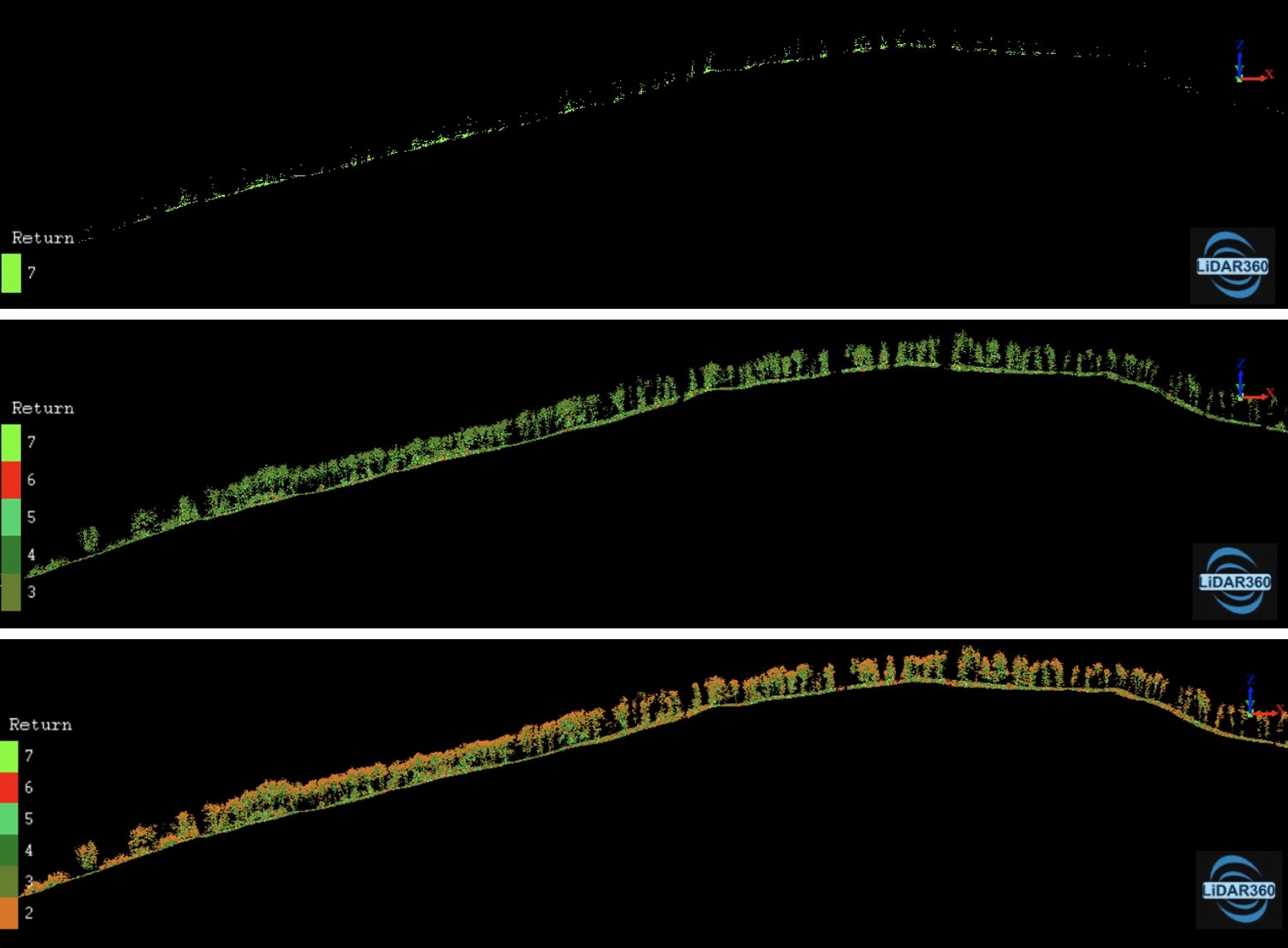
Fig. 3 – Esempi di classificazione della nuvola di punti in funzione del numero di ritorni associati ad ogni punto. Nel caso in esame vi sono fino a 7 ritorni.
Classificazione del terreno
Quanto è importante avere un LIDAR multiritorno per ottenere una buona classificazione del terreno?
Le considerazioni fatte poco sopra rendono evidente intanto come l’importanza del multiritorno si può evidenziare in aree vegetate o in presenza di strutture e infrastrutture che si distaccano evidentemente dal terreno.
Detto questo la classificazione del terreno non avviene soltanto in funzione del multiritorno. Per intenderci, non è detto che l’ultimo ritorno stia per forza sul terreno e, viceversa, che il primo ritorno non appartenga al terreno. Ci sono quindi una serie di algoritmi che tengono conto di altri parametri, quali la riflettanza, l’intensità del raggio, la variazione di quota tra punti vicini (che ovviamente è poco indicativa di un terreno standard). A tali algoritmi si aggiunge anche, come informazione aggiuntiva, il dato sul multiritorno. Laddove vi sono diversi ritorni si da maggiore peso all’ultimo echo, che ha più probabilità di appartenere al terreno, pur non avendone certezza. Il primo echo può essere indicativo di un punto sul terreno, solo a patto che esso coincida, o sia molto vicino, ai successivi.
In sintesi non è solo il multiritorno a garantire una buona classificazione del terreno, ma certamente in aree complesse può essere un valido aiuto.
Rilievo in aree forestate
I rilievi in aree forestate sono un caso tipico nel quale la tecnologia LIDAR si rivela essenziale. Proprio la possibilità di avere il multiritorno è quella caratteristica che rende la tecnologia LIDAR molto performante in questi casi. La cosiddetta penetrazione del raggio attraverso la vegetazione può avvenire proprio nel caso in cui il sensore LIDAR riesca a registrare diversi ritorni. È chiaro quindi, in questo contesto, che quanti più sono i ritorni registrabili, tanto più sarà possibile effettuare un rilievo forestale completo. Vi sono sensori che consentono di registrare 5, 6, 7 ritorni. Per la scelta del corretto sensore vi è poi da considerare anche la caratteristica dell’area forestata. La quantità e la tipologia di alberi la può rendere più o meno complicata da rilevare. Foreste con alberi fitti e sempreverdi sono decisamente più complesse da “attraversare” (Fig.4). Inoltre un sottobosco poco fitto o pieno di vegetazione può fare molta differenza. Anche in questo caso avere un multiecho è certamente un valore aggiunto, ma può essere importante effettuare un rilievo lidar integrativo anche da terra, con strumenti portabili, qualora il segnale da drone non riuscisse a raggiungere il terreno con sufficiente continuità e completezza.

Fig. 4 – Nuvola di punti LiDAR elaborata nel software DJI Terra
Conclusioni
Il multiritorno è una caratteristica tipica della tecnologia LIDAR. Il sensore attivo emette infatti il raggio laser che può essere riflesso in più parti, definendo, a parità di direzione del raggio, più di un punto sulla superficie.
Tale caratteristica intanto impatta sulla quantità di punti acquisiti, che possono raddoppiare o triplicare, a seconda del sensore, rispetto ad un medesimo sensore a singolo ritorno. Spesso si predilige un dato con almeno 3 ritorni poichè garantisce un rilievo completo anche nelle aree più complesse, come le foreste fitte.
