


















INDICE
I termini FIX e FLOAT sono spesso usati per indicare la qualità del posizionamento GNSS. In realtà, tali termini non si riferiscono direttamente alla precisione del posizionamento ma alla modalità di fissaggio dell’ambiguità di fase. Chiaro che tale condizione ha una relazione diretta con la precisione del posizionamento ma, in linea teorica, i termini FIX e FLOAT si riferiscono ad altro.
Tutto ciò ha evidentemente un significato nel momento in cui si effettuano misure di fase in cui, appunto, vi è anche l’ambiguità, di fase appunto, come incognita.
Che cosa sono le ambiguità
Vediamo nel dettaglio che cosa sono le ambiguità di fase.
Come noto, per determinare le coordinate del punto a terra, occorre partire dalla determinazione della distanza satellite ricevitore, epoca per epoca. A partire da tale dato geometrico, mediante una sorta di intersezione in avanti, vengono calcolate le coordinate. Proprio per determinare la distanza satellite ricevitore, a partire dalle misure di fase, è necessario introdurre il concetto di ambiguità.
Come si vede in fig. 1, il segnale di fase è una sorta di onda sinusoidale che parte dal satellite e arriva al ricevitore. Sommariamente possiamo dividere in due parti tale segnale. Una parte frazionaria che il ricevitore è in grado di misurare. Una parte intera, definita proprio come il numero intero di lunghezze d’onda, che passano tra il ricevitore e il satellite. Tale parte è, appunto, l’ambiguità di fase.
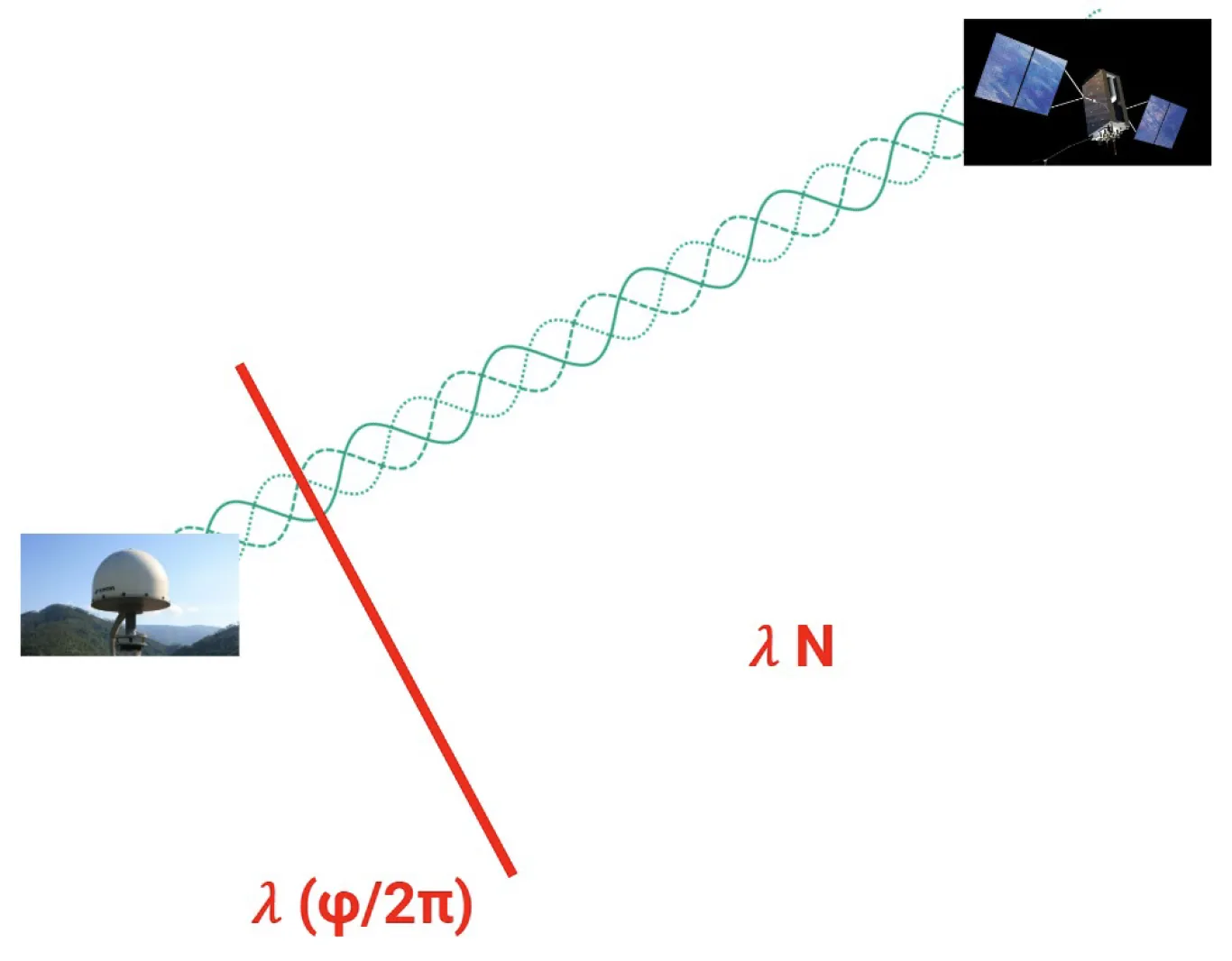
Fig. 1 – Rappresentazione geometrica dell’ambiguità di fase
Nello specifico l’ambiguità viene definita “ambiguità iniziale” poiché essa deve essere calcolata all’istante t0 , quando il satellite inizia ad essere tracciato dal ricevitore. A partire da quell’istante, il ricevitore è in grado autonomamente di capire quanto varia, epoca per epoca, tale valore.
In sintesi, l’ambiguità è per definizione un numero intero.
Come avviene il fissaggio delle ambiguità
Il fissaggio dell’ambiguità è un’operazione che deve avvenire durante le prime fasi del rilievo. Tale fase può avere una durata variabile, da pochi secondi a alcuni minuti generalmente, a seconda delle condizioni al contorno e del tipo di rilievo.
Consideriamo che, all’avvio del rilievo, l’ambiguità iniziale è un’incognita, così come lo sono tutte le altre incognite che si riferiscono principalmente agli effetti di disturbo sul segnale. Come noto, tali effetti possono essere mitigati o modellati in diversi modi, utilizzando modelli interni, servizi di correzione differenziale (per i rilievi RTK), tecniche di differenziazione delle osservabili (sia in tempo reale che in post processamento).

Anche le ambiguità di fase sono, esattamente allo stesso modo di tutti gli effetti citati, delle incognite all’interno delle equazioni di soluzione; traggono, quindi, giovamento dal fatto di riuscire a modellare o stimare o eliminare altri effetti di disturbo. Provando a fare un esempio pratico, ci si riferisce ad un rilievo in tempo reale. Quando le correzioni differenziali iniziano ad essere ricevute, esse consentono di “eliminare” in alcuni secondi molte voci incognite relative agli effetti di disturbo. È evidente a questo punto che sarà più facile risolvere anche le ambiguità, assegnando ad essere un valore noto anziché lasciarle come incognite, poiché all’interno delle equazioni di soluzione del sistema, il numero di incognite diminuisce mano a mano che le correzioni differenziali portano informazioni.
Questo è il motivo per cui sul nostro ricevitore riusciamo a vedere una soluzione che passa dallo stato “Stand alone” a quello “Float” e a quello “FIX” mano a mano che le correzioni differenziali aiutano nella soluzione del sistema.
Cosa si intende però per soluzione “Float”?
L’ambiguità è un numero intero per definizione. I metodi di soluzione prevedono, però, che si definisca un valore reale come primo step per avvicinarsi alla soluzione finale. Quando l’ambiguità di fase per ogni satellite risulta identificata con un numero reale, si passa quindi alla soluzione cosiddetta “Float“. È chiaro che tale valore non è quello corretto e definitivo ma è certamente meglio che lasciare l’ambiguità totalmente incognita.
Questo si ripercuote sulla precisione delle coordinate finali.
Una soluzione stand alone (in cui non si ha alcuna informazione sull’ambiguità di fase) utilizzerà soltanto le misure di codice con una precisione del posizionamento dell’ordine dei metri.
Una soluzione FLOAT (in cui l’ambiguità di fase è un numero reale) utilizza le misure di fase ma non ha perfettamente nota la misura della distanza tra satellite e ricevitore, consentendo di ottenere un posizionamento con precisione di alcune decine di centimetri
Una soluzione FIXED (in cui l’ambiguità è stata effettivamente fissata ad un numero intero) consente di ottenere un posizionamento con precisione di pochi centimetri.

I falsi fissaggi
Volutamente, nel passaggio precedente, non si è posta attenzione particolare al passaggio tra la condizione FLOAT e quella FIXED. L’ambiguità di fase FLOAT (numero reale) viene passata a FIXED (numero intero) a seguito di alcuni test statistici che traggono giovamento dal fatto che le epoche aumentano e le incognite vengono sempre più risolte. Può capitare però, in particolari condizioni, che vi siano dei cosiddetti “falsi fissaggi”. Ciò avviene quando all’ambiguità per un singolo satellite viene assegnato un valore intero che, però, non corrisponde a quello vero, corretto. Il numero intero di lunghezze d’onda tra satellite e ricevitore non è, nella realtà, quello che viene calcolato dal ricevitore. Si tratta di un fenomeno raro ma può accadere. Spesso, in casi in cui vi siano condizioni particolarmente avverse, in cui, ad esempio, alcuni effetti di disturbo locale siano difficilmente “eliminabili” dal sistema e, quindi, rendano difficile la soluzione del sistema stesso.
Clicca qui e scopri il software rivoluzionario TPad per la Topografia da campo
Cosa ci si può aspettare quando si ha un falso fissaggio?
Intanto diventa difficile da individuare, almeno in tempo reale. La soluzione è comunque FIXED, quindi precisa. In termini di coordinate possiamo aspettarci una soluzione precisa ma probabilmente si perde in accuratezza. La soluzione è stabile nel tempo, varia poco da un epoca all’altra (precisione), ma le coordinate non sono corrispondenti al valore vero (accuratezza). Per esporre meglio il concetto, si rappresenta in figura 2 una nota rappresentazione per spiegare la differenza tra precisione e accuratezza.
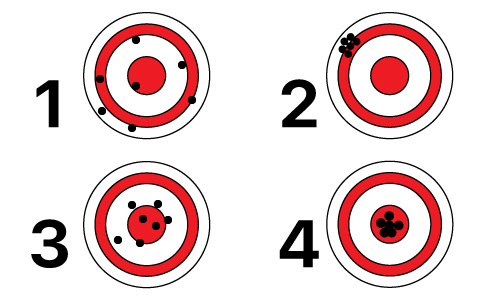
Fig. 2 – Rappresentazione simbolica dei concetti di precisione e accuratezza
1 – Misure poco precise e poco accurate
2 – Misure poco precise e accurate
3 – Misure precise e poco accurate
4 – Misure precise e accurate
In un falso fissaggio, quindi, possiamo avere misure precise ma poco accurate.
Cosa accade invece per le soluzioni FLOAT?
Ecco, in questo caso c’è un basso rischio di avere misure poco accurate poiché, non essendo passati alla fase di fissaggio ad intero, non si corre il rischio di incorrere in un falso fissaggio. Ma certamente non ci si può aspettare di avere misure precise. Per riferirsi alla figura sopra, in caso di soluzioni FLOAT, è probabile che ci si ritrovi nelle condizioni 3.

Talvolta accade anche che una soluzione FLOAT può portare problemi di accuratezza, oltre che di precisione.
In tutti questi casi, tipicamente presenti quando si hanno condizioni difficili per il rilievo, occorre guardare in maniera più approfondita i segnali dei singoli satelliti. Eventualmente inserire dei filtri più stringenti sul SNR (Signal Noise Ratio) , togliere satelliti complessi dal calcolo, incrementare il cutoff. In generale, come spesso accade anche per gli effetti di disturbo sul segnale, i problemi legati al fissaggio delle ambiguità si possono risolvere con un numero abbondante di satelliti che consente all’operatore di avere maggiore margine di manovra per eliminare, modificare, filtrare i segnali.
Seguici sui nostri canali social per non perderti le news!
- YouTube: www.youtube.com/@strumentitopografici8174
- Facebook: https://www.facebook.com/@gec.softwareita
- Instagram: https://www.instagram.com/gecsoftware/
- Linkedin: https://www.linkedin.com/company/gec-software/