
PPK: elaborazioni dei dati in pochi click con Emlid Studio
Emlid Studio semplifica l’elaborazione PPK dei dati GNSS, permettendo di processare rilievi statici, cinematici e dati da drone in pochi passaggi. L’articolo spiega flussi di lavoro, file necessari e vantaggi operativi.
In questo articolo
- Caricamento indice…
Da qualche anno, i rilievi di precisione RTK/PPK hanno raggiunto notevoli livelli di sviluppo. Attualmente quando si rileva, le costellazioni di satelliti disponibili (GPS, GLONASS, GALILEO, BEIDOU) permettono posizionamenti non inferiori a 12 satelliti.
Un alto numero di satelliti visibili e utilizzabili è fondamentale per velocizzare il cosiddetto FIX e quindi l'accuratezza centimetrica nel rilievo.
Distinzione tra RTK e PPK
Real-Time Kinematic o RTK è una tecnica di rilevamento utilizzata per migliorare l’accuratezza dei dati raccolti del ricevitore collegato ai satelliti. È necessario utilizzare due ricevitori: una base ed un rover. Quando si lavora in RTK, i dati raccolti sul campo risentono in tempo reale delle correzioni provenienti dalla stazione base. È possibile, dunque, visualizzare l’accuratezza dei dati nell’immediato. Per questo, è importante accertarsi che ci sia sempre connessione tra i due ricevitori. Se questo, da un lato, garantisce velocità nell’esecuzione di un rilievo dall’altro, gli eventuali errori commessi sul campo non potranno essere corretti in ufficio.

Post-Processed Kinematic o PPK è una tecnica di rilevamento utilizzata per quando si vuole maggiore accuratezza nei rilievi e anche quando non è possibile lavorare in RTK. L’assenza di connessione ad internet, ad esempio, è uno dei casi più conosciuti. Non potendo ricevere le correzioni differenziali da servizi a pagamento (es. HxGN SmartNet più conosciuto con il vecchio nome ItalPos) o gratuiti come quelli messi a disposizione da alcune regioni Italiane (ex. Spin GNSS) sposta la scelta sull’esecuzione di un lavoro in modalità PPK. Avendo a disposizione un sistema Base-Rover, il problema potrebbe essere dato dalla comunicazioni via radio delle due antenne. Anche in questo caso senza correzioni differenziali, si opterà per il PPK.
Nei rilievi PPK, quindi, i dati vengono registrati separatamente da rover e base e verranno trattati successivamente in post-elaborazione. Ovviamente, come già accennato, esistono software specifici che “confrontando” e “mescolando” i dati grezzi di Rover e Base, forniranno i dati richiesti con accuratezze centimetriche.

Scopri di più sulla rete nazionale NRTK FULL GNSS Unlimited
Elaborazioni PPK immediate
I rilievi PPK sono più facili a dirsi che a farsi! Anzitutto la fase di raccolta dei dati sul campo, sicuramente più onerosa in termini di tempo visto che su ogni punto da rilevare si dovrà lasciare il GNSS in osservazione per almeno 7/8 minuti.
In ufficio poi bisognerà utilizzare un apposito software come il famoso RTK Lib che, sicuramente per chi non ha una discreta conoscenza del posizionamento satellitare, risulterà complesso da utilizzare. Emlid ha pensato di semplificare questa procedura con un’applicazione in grado di eseguire elaborazioni di dati collezionati in modalità statica (PPK) in pochi e semplici passaggi, grazie all’interfaccia intuitiva e moderna.
L’applicazione desktop multipiattaforma Emlid Studio è completamente gratuita ed è stata sviluppata per la post-elaborazione dei dati grezzi derivanti da qualsiasi ricevitore GNSS oppure per elaborare e geotaggare le foto derivanti da di droni, come DJI Phantom 4 RTK o Autel EVO II RTK, che non hanno potuto sfruttare sul campo la tecnologia RTK. Emlid Studio è disponibile per sistemi operativi Windows (v.10 e successive) e MacOS (v.10.14 e successive).

Scopri di più su Emlid Reach RS2+
L’interfaccia di Emlid Studio risulta semplice ed intuitiva e consente, in pochi ed elementari passaggi, di ottenere l’elaborazione dei punti, mostrando i risultati in maniera grafica e facilmente comprensibile anche da chi ha poca esperienza con il post-process dei dati.
Diverse tipologie di elaborazione
Emlid Studio ha cinque flussi di lavoro:
-
Elaborazione statica
Lo Static Processing permette di ottenere la posizione precisa di un singolo punto utilizzando i dati grezzi della base o di una stazione di riferimento operativa più vicina.

-
Elaborazione cinematica
Il Kinematic Processing permette di ottenere la traccia precisa delle misurazioni utilizzando i dati grezzi registrati con la base e il rover senza un collegamento di correzione.

-
Elaborazione dei dati dei droni
Il Drone Data Processing permette di aggiungere il geotag delle foto scattate durante il volo con il drone per effettuare un’analisi più dettagliata e precisa nel software di Fotogrammetria.

-
Stop & Go con ReachView 3
La funzione Stop & Go with ReachView 3 elabora i punti separati con coordinate precise utilizzando i dati grezzi registrati con la base e con il rover insieme ad un file .CSV fornito dall’app ReachView 3.

-
Conventi i log in RINEX
Emlid Studio permette di convertire i file grezzi nel formato UBX e RTCM3 direttamente nel formato RINEX con la funzione Convert to RINEX.

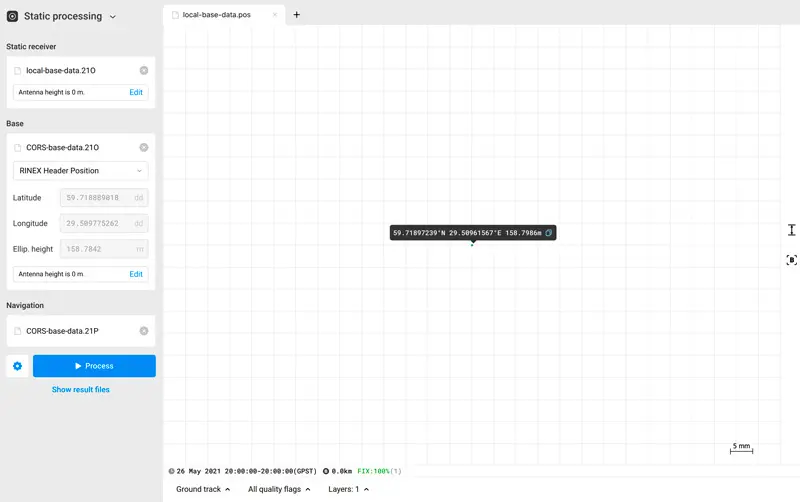
Elaborazione statica
Lo Static processing consente di ottenere la posizione precisa di un singolo punto. Di solito, questo flusso di lavoro viene utilizzato per ottenere le coordinate dei punti rilevati quando si esegue un rilievo senza accesso ad Internet o si vuole ridurre la base-line (distanza) tra la base ed il rover.
È dunque necessario registrare i dati grezzi sul proprio GPS e ottenere i dati dalla base fissa sul territorio più vicina alla zona del rilievo, per effettuare un’ulteriore post-elaborazione.
Di cosa avrai bisogno?
- File di osservazione RINEX da una base fissa sul territorio
- File di osservazione RINEX dal tuo GPS
- File di navigazione RINEX da una base fissa o dal tuo GPS
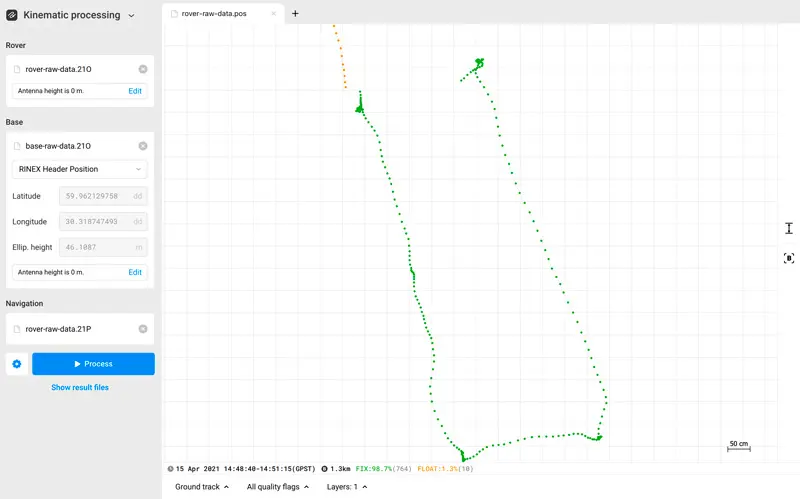
Elaborazione cinematica
Il Kinematic processing consente di ottenere una traccia precisa delle misurazioni utilizzando i dati grezzi da una base e da un rover registrati senza un collegamento di correzione. Proprio per questo, viene utilizzata come backup per RTK.
Di cosa avrai bisogno?
- File di osservazione RINEX da una base
- File di osservazione RINEX da un rover
- File di navigazione RINEX da una base o da un rover
Elaborazione dei dati dei droni
Il Drone Data Processing viene suddiviso in due flussi di lavoro:
- Elaborazione dei dati con droni
- Elaborazione dei dati con droni RTK
Nel primo caso, Emlid Studio permette di aggiungere geotag ai dati EXIF delle fotografie scattate con il drone ed elaborarli successivamente nel software di Fotogrammetria
Di cosa avrai bisogno?
- File di osservazione RINEX da una base
- File di osservazione RINEX da un rover
- Fotografie scattate con il drone
- File CSV con le coordinate dei GCP (punti di controllo a terra) – opzionale da utilizzare nel software di fotogrammetria
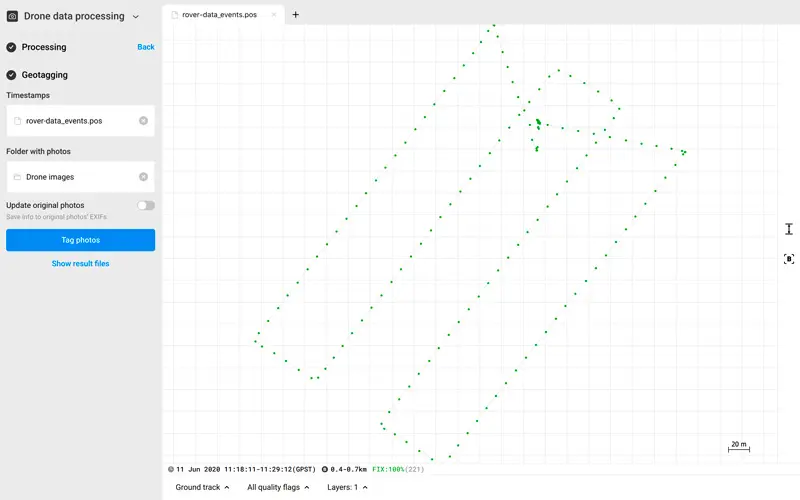
I dati RINEX verranno utilizzati per ottenere le coordinate precise per il geotagging delle immagini. Il file CSV non è necessario ma è essenziale per un ulteriore elaborazione nel software di Fotogrammetria.
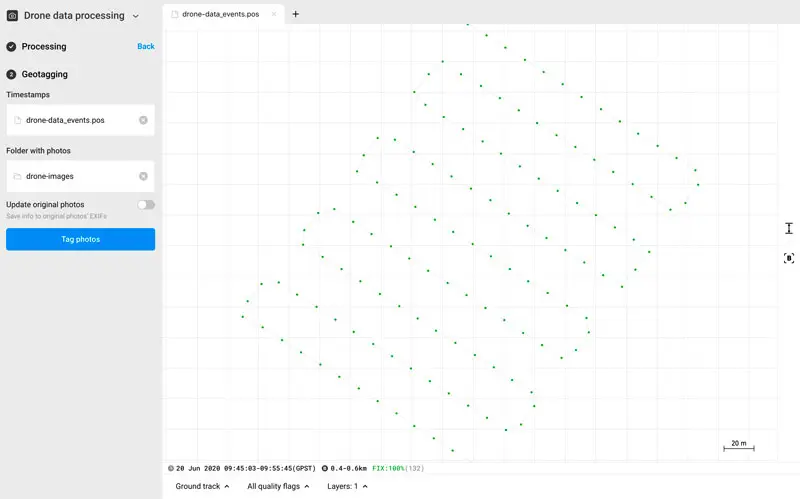
Nel secondo caso, Emlid Studio permette di elaborare le immagini ottenute dal volo di droni RTK che sono state acquisite in modalità Float o Single ed ottenere immagini georeferenziate con coordinate precise.
Di cosa avrai bisogno?
- File di osservazione RINEX da una base
- File di osservazione RINEX da un drone RTK
- Fotografie scattate con il drone
- File MRK del drone RTK
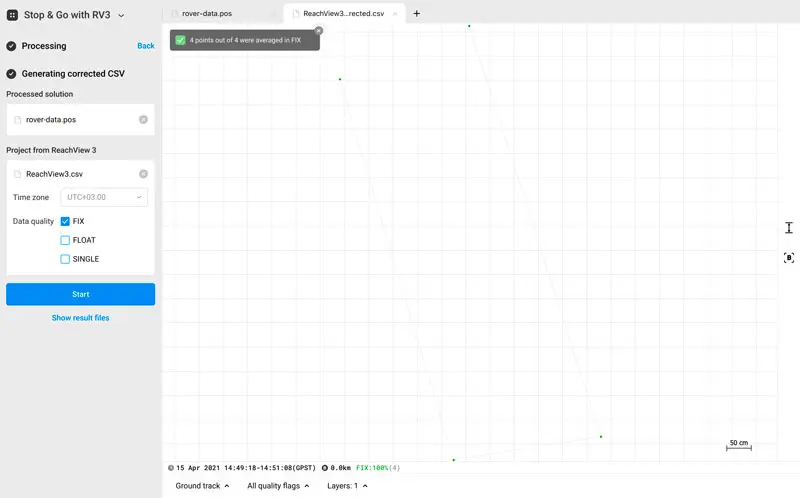
Stop & Go con ReachView 3
La funzione Stop & Go with ReachView 3 consente di ottenere punti separati con coordinate precise della traccia delle misurazioni utilizzando i dati grezzi registrati con una base e un rover e un file CSV ottenuto dall’app ReachView 3.
La base deve essere posizionata in un punto noto mentre al rover tocca il compito di raccogliere tutti i punti sconosciuti ed occuparli per un breve tempo. Ecco perché questa tecnica viene chiamata Stop & Go.
Questa funzione può essere utilizzata quando risulta impossibile fornire un collegamento in tempo reale tra la base ed il rover per vari motivi, come un raggio visivo insufficiente tra i due ricevitori, l’assenza della connessione Internet, la non disponibilità del servizio NTRIP, ecc.
Di cosa avrai bisogno?
- File di osservazione RINEX dalla base
- File di osservazione RINEX dal rover
- File di navigazione RINEX dalla base o dal rover
- File CSV dall’app ReachView 3
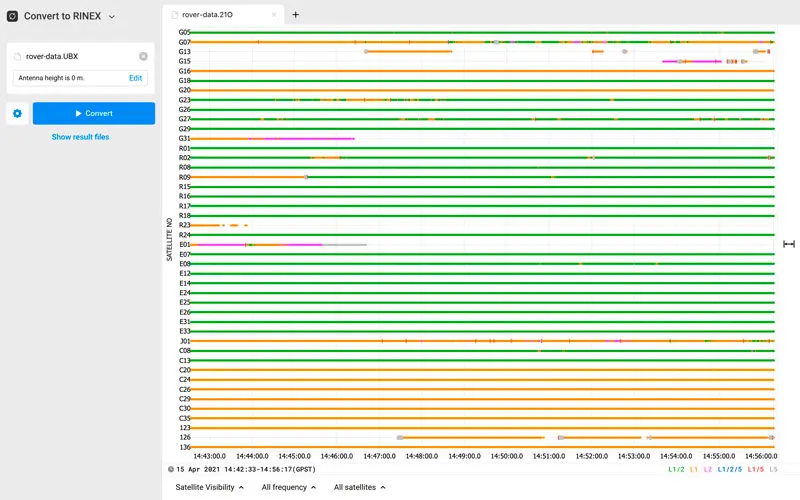
Converti in RINEX
La funzione Convert to RINEX consente di convertire i dati grezzi nel formato RINEX standard in automatico. Questo formato è progettato per evolversi ed adattarsi alle nuove tipologie di misurazione ed ai nuovi sistemi di navigazione satellitare.
Di cosa avrai bisogno?
- UBX
- RTCM3
- Versioni precedenti di RINEX
Conclusioni
Emlid Studio rappresenta un importante traguardo per l’elaborazione dei dati di rilievi PPK. È la chiave per la felicità di molti tecnici che fino ad oggi si sono trovati a dover elaborare complicatissimi file in software “rompicapo” e molto costosi.
Con questo nuovo software, è possibile elaborare i file grezzi e geotaggare le fotografie al centimetro in pochi semplici click… e tutto a costo zero!
Scopri di più su Emlid Reach RS2+
Potrebbero interessarti...

FJD Trion P2: cosa cambia con il firmware V1.2.0
Il firmware V1.2.0 di FJD Trion P2 introduce nuove funzioni per migliorare scansione, gestione del rover, foto integrate, punti di controllo e rilievi estesi. L’articolo anali…
Leggi di più
Scansione 3D georeferenziata: come lavorano insieme GNSS RTK e LiDAR
La scansione 3D georeferenziata unisce GNSS RTK e LiDAR per ottenere nuvole di punti già posizionate nel mondo reale. L’articolo spiega come lavorano insieme, quali vantaggi …
Leggi di più
Rilievo 3D professionale: perché le misure contano più del colore
Nel rilievo 3D una nuvola di punti colorata non è sempre la scelta migliore. L’articolo spiega quando il colore può rallentare scansione, elaborazione e consegna, e perché …
Leggi di più