


















INDICE
Dopo aver visto i settaggi del nostro DJI Mavic 3E Enterprise con il Modulo RTK, possiamo procedere con il creare una missione di volo. Importante ricordare che eseguiremo una missione di volo a quota costante anche se il terreno, oggetto di rilievo, presenta dislivelli. Il “Terrain Follow” verrà trattato in un articolo a parte questo perché i tecnici DJI non hanno ancora semplificato, e non si riesce ancora a capire il perché, la gestione dei voli su terreni inclinati.
Preparazione della missione di volo
Il DSM viene digerito da Pilot 2 sotto forma di DSM, che non vada oltre un tot di Mb, costringendo l’utente o a fare un volo pre-missione fotogrammetrica (cosa a dir poco nauseante) o a lavorare con QGIS per utilizzare DSM di terze parti, ritagliarli, esportarli nel giusto sistema di coordinate e caricarli sul radiocomando mendiate SD esterna (funziona ma è un lavoraccio).
Sul terreno, verranno posizionati e rilevati con GNSS multifrequenza, 8/10 marker che serviranno anzitutto per verificare l’accuratezza del rilievo (è solo un test normalmente con sistema RTK un paio di target sono sufficienti) ma soprattutto perché eseguiremo la stessa missione di volo con e senza il modulo RTK montato sul drone. Quindi, lo stesso drone, con e senza modulo, e confronto dei dati sullo stesso terreno nelle stesse identiche condizioni di volo, stesso numero di fotografie ma con la differenza delle correzioni differenziali di rete. Sarà davvero interessante vedere i risultati finali!
Scopri di più sul DJI Mavic 3E Enterprise RTK
Preparazione della missione per volare con e senza modulo RTK
Per avere sempre la stessa missione di volo e ripeterla nelle varie condizioni e per i successivi confronti con altri droni con RTK a bordo (Autel EVO II RTK, DJI Phantom 4 RTK e altri) abbiamo creato un file KMZ su Google Earth (Fig.1). In questo modo, il perimetro sarà sempre lo stesso e si potranno valutare e confrontare correttamente i dati derivanti dai vari test.
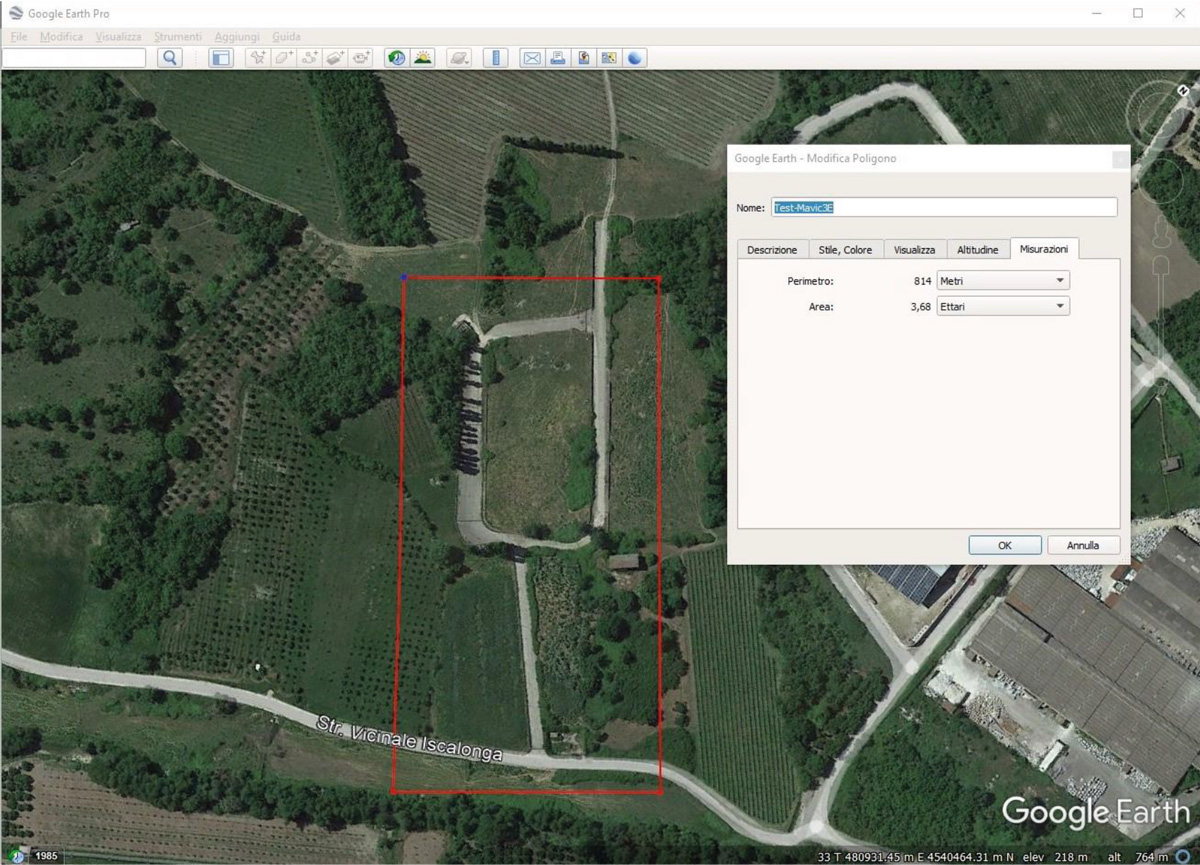
Fig. 1 – File KMZ ottenuto su Google Earth
Il KMZ ottenuto è stato salvato su una scheda SD che sarà inserita nel radiocomando per essere caricata quando si crea la missione di volo.
Nel dettaglio, abbiamo settato la camera del DJI Mavic 3E Enterprise tra quelle disponibili, impostato una quota di volo di 80 metri rispetto al punto di decollo con una velocità di 10m/s, sovrapposizione delle foto frontali dell’80% e di quelle laterali al 75%.
Adesso si va in campo per posizionare i target di riferimento e rilevarli con il GNSS topografico. Fatto ciò, saremo pronti per volare sia in modalità RTK, quindi con il modulo montato, sia in modalità tradizionale e quindi senza il modulo GNSS aggiuntivo.
Rilievo dei target
Per il rilievo dei target, utilizziamo l’ormai conosciuto e affidabile GNSS “Emlid RS2” unito al software topografico da campo per android “TPad”(Fig.2). Un bipode per tenere perfettamente in bolla la palina del GNSS durante le osservazioni dei target completerà le accortezze da utilizzare per ottenere la massima accuratezza dei dati rilevati.

Fig. 2 – Rilevamento dei target con GNSS Emlid Reach RS2 e Tpad
Scopri di più sul GNSS Emlid Reach RS2+

Sopralluogo ed ispezione visiva
Sul campo abbiamo anzitutto verificato, mediante ispezione visiva, che non ci fossero ostacoli per la quota di volo impostata. Il sopralluogo ha anche consentito la scelta della zona migliore al decollo e l’equa distribuzione dei target sia in planimetria che altimetria.
N.B.: si ricorda ancora una volta che il numero di target distribuiti sul terreno in questo test è volutamente superiore a quelli necessari al solo controllo di un volo effettuato con drone RTK. Tuttavia i cosiddetti GCP saranno utili alla georeferenziazione della nuvola ottenuta dal volo senza modulo RTK montato a bordo ma, visto che di test si tratta, anche a una più puntuale e distribuita comprensione dell’accuratezza media sulla nuvola generata dalle foto contenenti l’exif già completo di correzioni differenziali RTK.
Sul campo per testarne tutte le potenzialità
Se all’elevato standard costruttivo DJI ci aveva ormai abituato la velocità di acquisizione dello stato di FIX del modulo RTK aggiuntivo è stata una vera sorpresa. Il Phantom 4 RTK a paragone sembra una lumaca. Sicuramente l’aspetto di velocità di acquisizione di posizionamento centimetrico verrà approfondita in un test che vedrà a confronto DJI Mavic 3E Enterprise, DJI Phantom 4 RTK e Autel EVO II RTK. Sta di fatto che, in campo, anche a “freddo”, e quindi accensione per la prima volta nella zona oggetto di rilievo, il DJI Mavic 3E Enterprise si è dimostrato un vero e proprio fulmine anche se le condizioni circostanti non erano delle migliori (palazzi, alberi…).
Il volo di DJI Mavic 3E senza e con modulo RTK
Dopo i dovuti controlli per verificare che tutto sia in ordine, abbiamo caricato la missione di volo preimpostata e abbiamo dato il via al primo test e cioè quello con modulo RTK (Fig.3) a bordo attivato. Qualità di volo ineccepibile, traiettorie perfette, decollo e atterraggio fluidi e precisi infondono sicurezza all’operatore che può concentrarsi sul controllo totale della missione in corso.

Fig. 3 – Modulo RTK di DJI Mavic 3E Enterprise
Visualizza il prodotto DJI Mavic 3E Enterprise RTK Module sullo store
Pochi minuti di volo per mappare poco più di 3 ettari a 80 metri di quota. Segnale RTK mai perso dal drone grazie all’ottima comunicazione radio con il radiocomando. Con il volo eseguito sempre in FIX, le foto hanno già scritte, nell’exif, le coordinate corrette con accuratezza centimetrica.
Lasciamo al DJI Mavic 3E Enterprise il tempo di rientrare all’home point, lo spegniamo, svitiamo il modulo RTK, riaccendiamo il drone e con la stessa batteria ripetiamo la stessa missione di volo, questa volta però, utilizzando per rotta di volo e coordinate delle foto eseguite solo il GNSS di navigazione del drone.
Visualizza DJI Mavic 3E Enterprise sullo store
I dataset ottenuti in campo
Stesso identico tempo di volo, stesso numero di fotografie. Siamo pronti per rientrare in ufficio ad elaborare i dataset ottenuti in campo.
Nello specifico avremo a disposizione per l’elaborazione:
- Dataset volo in RTK (Fotografie già georeferite correttamente. Accuratezza centimetrica)
- Dateset volo senza RTK (Fotografie con coordinate del GNSS di navigazione. Accuratezza metrica)
- Target rilevati con GNSS (Coordinate di punti visibili nelle foto. Accuratezza centimetrica)
Conclusioni
In questo articolo, abbiamo affrontato la seconda parte della nostra prova sul campo con DJI Mavic 3E Enterprise. Per scoprire i successivi passaggi dell’elaborazione dei dati raccolti sul campo, resta aggiornato sul nostro blog. La terza puntata sarà disponibile mercoledì 7 dicembre 2022. Nel frattempo, puoi scoprire tutte le caratteristiche di questo nuovo drone cliccando sul seguente link:
Scopri di più sul DJI Mavic 3E Enterprise RTK