

















La forte crescita dei servizi di posizionamento per il tempo reale ha reso ormai comune l’utilizzo di tecniche di posizionamento basate su correzioni di rete. Le soluzioni NRTK (Network Real Time Kinematic) sono l’approccio più comune per tutti coloro che utilizzano tali servizi.
Che cosa sono le correzioni differenziali?
Prima di tutto si riporta un approfondimento sul significato di Correzioni Differenziali partendo proprio dal significato dei due termini:
- Correzioni – si tratta di un valore che ha l’obiettivo di correggere le osservabili che ad ogni epoca vengono lette dal ricevitore. Si applica cioè al range satellite ricevitore, e non invece alle coordinate del punto a terra. Esso viene inviato in tempo reale.
- Differenziali – tale correzione si esprime come una differenza tra l’osservabile che il ricevitore legge e l’osservabile “teorica” che dovrebbe osservare se non vi fossero effetti di disturbo sul segnale. In questo modo vengono eliminati, o ridotti significativamente, gli effetti di disturbo sull’osservabile stessa.
In sintesi, la correzione differenziale aiuta ad affrontare il problema degli effetti di disturbo che affliggono il segnale.

In un rilievo in post-processing tale problema viene affrontato appunto dalla fase di elaborazione, attraverso la quale si mitigano, riducono o eliminano gli effetti di disturbo attraverso combinazioni di osservabili. Le correzioni differenziali hanno la funzione di raggiungere lo stesso obiettivo, ma in tempo reale. Consentono cioè di mitigare, eliminare o modellare la maggior parte degli effetti di disturbo, consentendo di fissare ad intero le ambiguità di fase direttamente in tempo reale, sul campo.
I servizi di rete
Le correzioni differenziali generalmente fornite dai servizi di rete possono essere di diverso tipo. Il concetto resta il medesimo, quello descritto poco sopra, ma si possono distinguere in base al formato di trasmissione e alla tipologia di generazione della correzione stessa. Tra le correzioni di rete (NRTK) ad esempio si possono distinguere correzioni di tipo VRS o di tipo areale. Le prime di fatto si basano sulla creazione di una stazione virtuale, in una zona prossima alla posizione del rover. Le seconde invece mandano una serie di parametri che definiscono un modello di errore sull’intera area coperta dalla rete fisica di stazioni permanenti. In questo secondo caso è il rover stesso che, ricevuti tali parametri, interroga di fatto il modello areale deducendo le correzioni da applicare alla propria posizione specifica.
Si tratta comunque, in entrambi i casi, di correzioni di rete. Correzioni cioè che sono calcolate a partire da una serie di stazioni permanenti che coprono un’intera area. Diverso invece è il caso delle correzioni da singola stazione. Tutti i servizi di rete forniscono infatti, tra i diversi tipi di correzioni differenziali, anche una o più soluzioni da singola stazione. In questo caso quindi la correzione non viene calcolata a partire dall’unione di una serie di diverse stazioni, ma più semplicemente essa viene calcolata dalla stazione base scelta, in autonomia, e viene inviata direttamente al rover.
Analogamente la correzione da singola stazione si può creare anche quando si effettua un rilievo in tempo reale con una configurazione “base – rover”, con la propria coppia di ricevitori in autonomia.
Scopri tutte le caratteristiche del GNSS Emlid Reach RS2+
Le correzioni di rete e le correzioni da singola stazione possono avere pro e contro. La correzione da singola stazione si basa sull’assunto per cui la stazione base, che viene utilizzata per stimare l’errore complessivo che affligge il segnale ricevuto, invia tale errore stimato direttamente alla stazione rover. La stazione rover, dal canto suo, non può fare altro che ricevere tale “correzione differenziale” e applicarla interamente alle proprie osservabili. L’ipotesi quindi è che l’errore che affligge la stazione base sia lo stesso che affligge il rover. Tale ipotesi è tanto più vera quanto più base e rover sono vicini; poche centinaia di metri fino a pochi chilometri. Quando però la distanza aumenta tale ipotesi diventa meno solida, fino a diventare poco affidabile (Fig. 1).
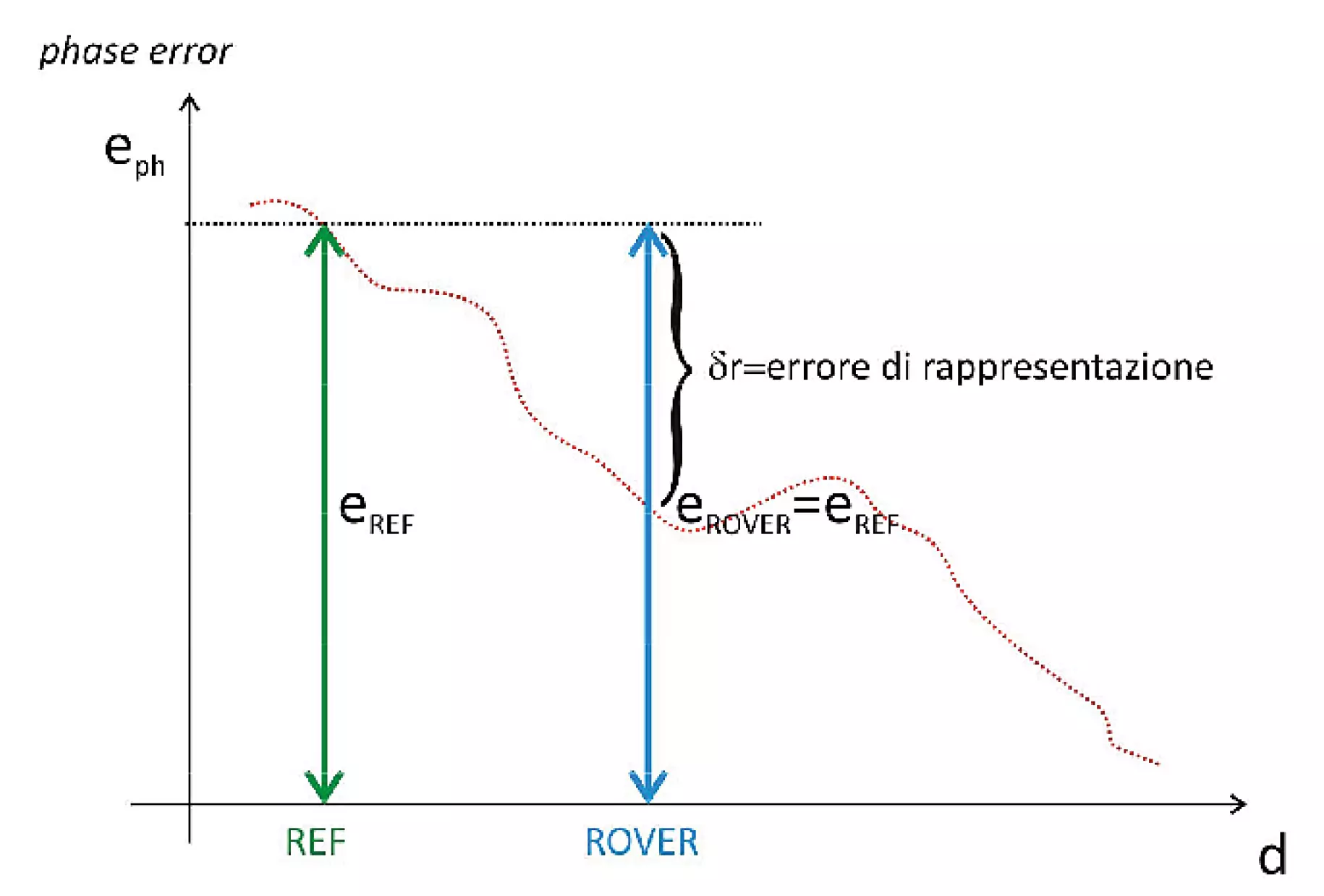
Fig. 1 – Schema della correzione differenziale da singola stazione
Questo ci indica che le correzioni differenziali da singola stazione hanno due limiti principali:
- sono considerate affidabili solo per rover piuttosto “vicini” alla base.
- l’effetto delle correzioni da singola stazione è variabile in funzione proprio della distanza tra base e rover. Mano a mano che il rover si allontana le correzioni sono meno significative. Non è possibile quindi definire a priori quanto una correzione di questo tipo sia affidabile, poichè appunto tale affidabilità cambia in funzione della distanza

Proprio per superare questi limiti si è passati ai servizi di rete. In questo caso infatti, pur partendo dallo stesso dato di input, si effettua un’elaborazione più approfondita. Infatti anche in questo caso ogni singola stazione stima l’errore commesso in corrispondenza di se stessa. Ogni informazione di questo tipo però viene inviata ad centro di controllo, che utilizzando tali informazioni genera un modello areale delle correzioni, sostanzialmente interpolando le stime degli errori arrivate da ogni singola stazione (Fig. 2).
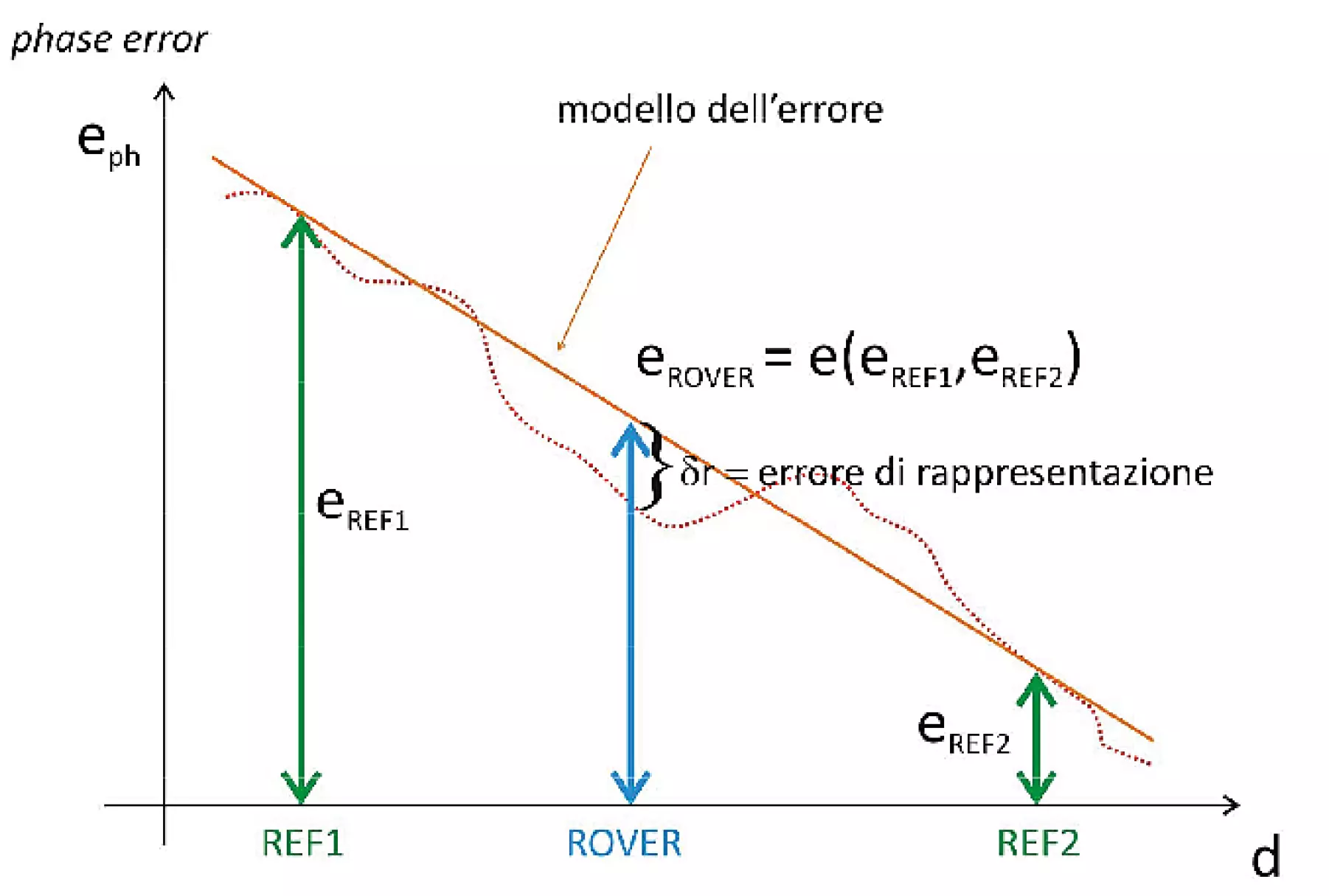
Fig 2 – Schema della correzione differenziale di rete
Così facendo si superano i problemi emersi, dunque:
- la distanza dalle singole stazioni fisiche non è più un problema.
- le correzioni differenziali hanno un’affidabilità costante in qualunque punto dell’area coperta dalla rete di stazioni permanenti
Da quanto è stato detto pare evidente come, in generale, le correzioni di rete (NRTK) siano da preferirsi.
La soluzione da singola stazione è comunque un backup di maggiore garanzia poiché si è certi che sia sempre disponibile, a patto che la stazione base sia funzionante e connessa alla rete. Il fatto che la soluzione di rete preveda infatti che venga effettuato, dal centro di controllo, il calcolo di rete in tempo reale, la rende di certo più affidabile quando viene calcolata, ma in parte più labile poiché è necessario che il calcolo di rete venga fatto. Questo non è detto sia sempre disponibile. In caso ad esempio alcune stazioni siano offline per qualche motivo (connettività dati, problemi di ricezione dell’antenna, problemi al ricevitore), ciò può influire negativamente sull’intero calcolo di rete e quindi non rendere disponibile il servizio di correzione. Anche nel caso in cui le eventuali stazioni problematiche siano in una zona diversa da quella in cui si trova il rover, l’influenza negativa sull’intero calcolo di rete rende le correzioni temporaneamente inapplicabili sull’intero territorio. E allora, in questo caso, si può ripiegare sulla correzione da singola stazione, magari meno affidabile in termini di precisione, ma con maggiori garanzie in termini di disponibilità.
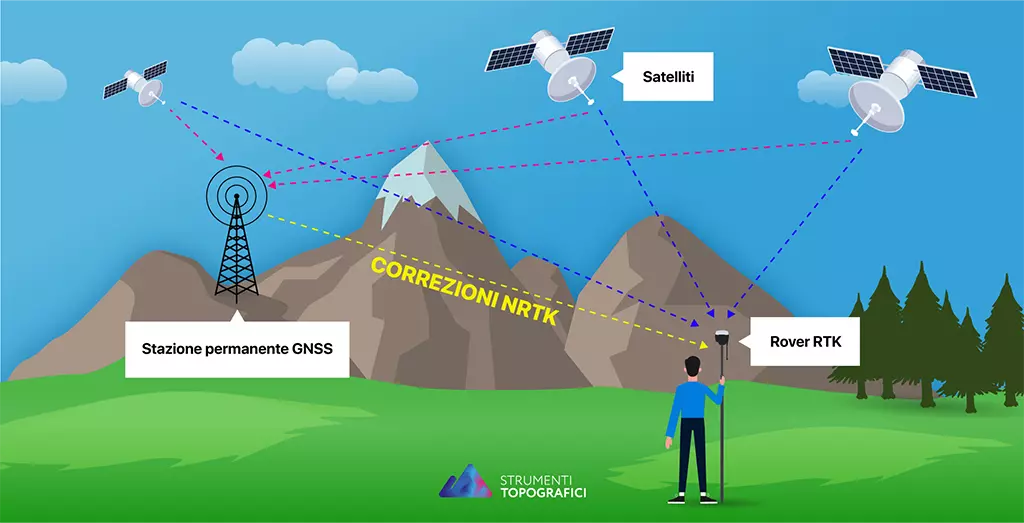
Fig. 3 – Rappresentazione grafica correzioni
Conclusioni
Le correzioni differenziali per il posizionamento GNSS in tempo reale sono un tipo di dato molto usato da tutti i tecnici che effettuano rilievi con ricevitori GNSS. Capirne il funzionamento, le premesse e eventuali punti deboli, aiuta ad effettuare un rilievo RTK o NRTK con maggiore consapevolezza, fornendo anche alcune indicazioni utili ad interpretare i risultati ed eventuali comportamenti anomali degli stessi.