

















INDICE
Il cutoff è un valore angolare che viene utilizzato come filtro per eliminare, selettivamente, i segnali satellitari più problematici.
Agisce, quindi, proprio come filtro e può essere utilizzato sia per un rilievo in real-time, sia in fase di elaborazione per un rilievo in post processing. Occorre, però, capire bene come agisce, quale effetto produce e quali siano le buone pratiche per utilizzarlo al meglio, in modo da massimizzarne l’effetto positivo.
Si tratta di un parametro piuttosto semplice da settare e da utilizzare, ma che spesso viene trascurato.
Lo scopo del presente articolo è quindi porre l’accento su caratteristiche e funzionalità, in modo da consentirne un utilizzo consapevole.

Principio di funzionamento
I segnali satellitari sono, come noto, onde elettromagnetiche sinusoidali che dal satellite giungono al ricevitore. In funzione, quindi, della posizione del satellite stesso, il segnale arriva al ricevitore con un angolo di direzione rispetto al nord e con un angolo di elevazione rispetto all’orizzonte locale.
Il cutoff agisce proprio considerando l’angolo di elevazione rispetto all’orizzonte locale. Si basa sul principio che satelliti “bassi sull’orizzonte” sono generalmente più sporchi e rumorosi e quindi, come tali, tendono maggiormente a sporcare la soluzione.
Ora è però del tutto evidente che vada fatta qualche analisi più approfondita, per poter individuare, di caso in caso, quale sia il valore di soglia più opportuno, per evitare di essere troppo restrittivi ma, al contempo, per ottenere un effetto positivo.
Andamento del rapporto segnale/rumore
Occorre partire dall’analisi del segnale GNSS.
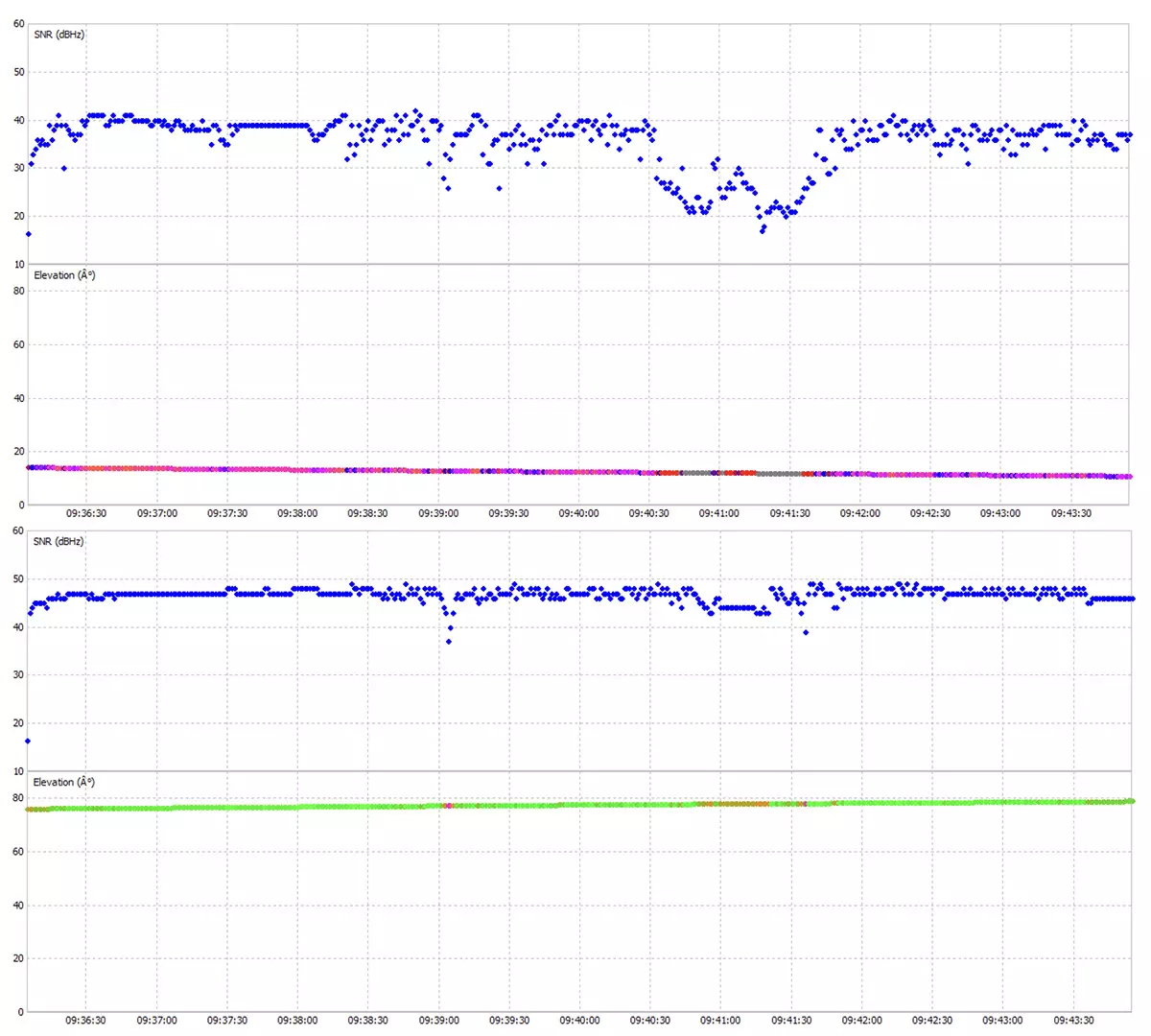
Fig. 1 – Andamento dell’SNR
In Fig. 1, è rappresentato, nel tempo, l’andamento del rapporto segnale/rumore (Signal Noise Ratio – SNR) di due satelliti ad elevazioni sensibilmente differenti. Nella parte bassa di ogni grafico è rappresentato l’andamento dell’elevazione, sull’orizzonte locale, nel corso del tempo, mentre nella parte alta, in blu, proprio il valore dell’SNR del satellite in questione.
Come è evidente, nel caso del primo satellite, l’elevazione è intorno ai 10 / 15 °, mentre nel caso del secondo satellite l’elevazione è molto vicina agli 80°; si tratta, quindi, di un satellite che, per il periodo di osservazione, si trova quasi sulla verticale rispetto al ricevitore.
Analizzando l’andamento dell’SNR, è molto evidente come i due comportamenti siano decisamente diversi. Nel caso del segnale a bassa elevazione, si evidenzia un valore di SNR quasi mai superiore a 40 dbHz, con un andamento molto discontinuo e con numerosi intervalli in cui tale valore scende di molto fino a toccare i 20 dbHz. Nel caso del segnale proveniente da un satellite in posizione ad alta elevazione, il valore di SNR è stabilmente sopra i 45, ha un andamento molto più costante e non presenta aree di decadimento della qualità, se non per alcuni punti singoli che in ogni caso non scendono sotto i 40 dbHz.
Scopri di più sul GNSS multifrequenza e multicostellazione Emlid Reach RS2+
Valore del SNR
Si tenga presente che il valore di SNR è uno degli indicatori più efficaci e precisi per definire quanto il segnale sia “pulito”. Quanto cioè il “rumore” sia elevato rispetto all’intensità segnale. Un segnale con SNR alto (indicativamente da 40 dbHz in su) è un segnale pulito, che da un contributo efficace alla stima della posizione. Un segnale con SNR basso (indicativamente sotto i 35 dbHz) comincia, invece, ad essere piuttosto rumoroso. In questo caso, il noise sporca il segnale rendendone sempre più difficoltosa l’interpretazione da parte del ricevitore con il risultato che il contributo di tale segnale alla stima della posizione è certamente meno efficace.
Evidenziata la relazione tra “pulizia” del segnale (SNR) e angolo di elevazione, analizziamo i possibili motivi di tale legame.
In linea generale, la presenza o meno di noise nel segnale è da ricercarsi e mettere in relazione con uno o più degli effetti di disturbo che agiscono sul segnale GNSS. Alcuni di questi effetti di disturbo sono più probabilmente presenti nei segnali a bassa elevazione.
In particolare, consideriamo il disturbo atmosferico. Senza distinguere tra effetto della ionosfera e della troposfera e senza entrare nel dettaglio sull’intensità e i motivi di tale tipo di disturbo, è, però, del tutto evidente come vi debba essere una relazione tra lo strato di atmosfera attraversato e la quantità di noise che si riversa sul segnale.
Un satellite basso sull’orizzonte attraversa l’atmosfera più a lungo rispetto ad un segnale proveniente dalla verticale, come rappresentato in figura 2.
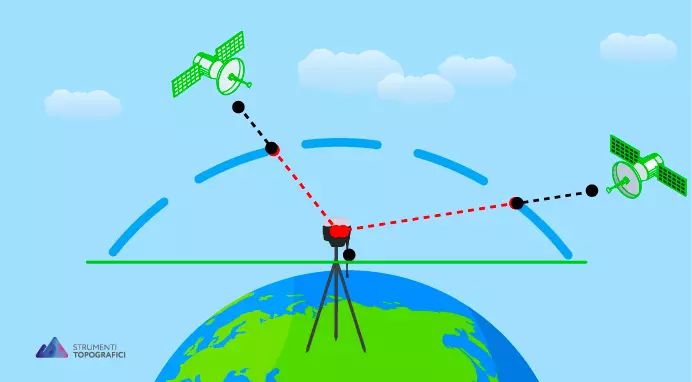
Fig.2 – Rappresentazione grafica della porzione di atmosfera attraversata dal segnale satellitare
La seconda ragione per cui il segnale a bassa elevazione può essere più a rischio di disturbo riguarda gli effetti locali.
Infatti, si consideri come la probabilità di incontrare disturbi, strutture o elementi che possano in qualche modo sporcare il segnale sia ovviamente più alta per segnali a bassa elevazione. La presenza di un palazzo, ad esempio, impedisce del tutto l’arrivo del segnale e la sua ricezione. Più complessa ancora, la presenza di elementi che, invece, non impediscono del tutto la ricezione, ma ne compromettono la qualità. Alberi, ad esempio. In questo caso, il segnale probabilmente passa tra le foglie ma arriva al ricevitore molto disturbato.
Tutti questi effetti sono evidentemente molto meno probabili per un segnale che arriva dall’alto, quasi in verticale.
Ancora, da ultimo, la presenza di multipath. Non solo, per i segnali più bassi sull’orizzonte, è alta la probabilità di incontrare ostacoli, ma anche vi è maggiore possibilità che il segnale sia riflesso da superfici che stanno oltre il ricevitore.

Fig. 3 – Schema dell’effetto di multipath per segnali provenienti da basse elevazioni
Come si evidenzia in figura 3, la presenza di una superficie riflettente diventa fonte di multipath, con maggiore probabilità, per i segnali provenienti da basse elevazioni.
Tutto quanto detto, quindi, rende evidente come la relazione tra angolo di elevazione e pulizia del segnale sia stretta.
Il cutoff agisce proprio in questo contesto. Si tratta, quindi, di un valore di soglia che definisce l’angolo sotto al quale il segnale proveniente dal satellite non viene registrato ed utilizzato per il posizionamento.
Quanto più è alto il valore di soglia, tanto più segnali verranno “eliminati”.
A questo punto, occorre distinguere tra rilievo RTK e PP.
Nel caso del rilievo in tempo reale, occorre importare il valore di cutoff ritenuto più adatto al caso in esame, direttamente in campo, sul controller, in tempo reale. Infatti, è necessario che il cutoff agisca direttamente sui segnali in ricezione, filtrandoli e non utilizzando quelli più bassi direttamente in fase di rilievo.
Nel caso del rilievo in PP, il valore di cutoff può essere impostato in fase di elaborazione, in ufficio. E, come è prassi nel caso di post-elaborazione, è possibile testare diversi valori di cutoff, verificando l’effetto in termini di qualità del posizionamento.
Leggi l’articolo “Come analizzare e gestire la qualità di un rilievo GNSS“
Criteri con cui impostare il valore di cutoff corretto
I criteri con cui impostare il valore di cutoff corretto possono essere diversi.
Valori tipici vanno da 0 a 20°, con possibilità di fare scelte anche diverse, in casi particolari.
In generale, si tende a non aumentare troppo il valore di cutoff, sopra i 20° o ancora i 30°, perchè si impatterebbe negativamente sulla geometria satellitare. È vero, infatti, che un alto valore di cutoff mette ragionevolmente al riparo dal rischio di avere molti segnali rumorosi ma, al contempo, aumenta il valore di PDOP perchè riduce di molto la porzione di cielo da cui si ricevono i segnali satellitari.
L’altro criterio da utilizzare riguarda il numero complessivo di satelliti in vista. Quanti più satelliti sono presenti, tanto più si può essere restrittivi con il cutoff, salendo a valori tra i 10 e i 20 gradi. Se, invece, si hanno pochi satelliti in vista, è maggiormente conveniente eliminare il cutoff e utilizzare tutti i segnali presenti, anche se non particolarmente puliti.
Infine, può avere senso utilizzare o meno il cutoff in funzione delle condizioni al contorno. In un’area di rilievo priva di ostacoli, senza edifici, vegetazione o altro, ha probabilmente poco senso usare un cutoff alto.
Conclusioni
Il cutoff è un parametro singolo, piuttosto semplice da capire e da utilizzare. Si consiglia, quindi, di porre attenzione a tale parametro, soprattutto per un rilievo in tempo reale, laddove il processing avviene direttamente in campo e non vi è quindi possibilità di fare ulteriori correzioni a posteriori.