

















INDICE
I ricevitori GNSS e, più in generale, la tecnologia satellitare per il posizionamento consentono di effettuare il rilievo con diverse tecniche, diverse modalità, diversi tipi di ricevitori ed antenne. La scelta dei metodi, degli strumenti e delle modalità operative dipendono molto dal campo di applicazione, dagli obiettivi del rilievo, dalle precisioni richieste. In questo contesto, una suddivisione tipica riguarda i rilievi in tempo reale e in post processing.
I rilievi RTK o NRTK sono di gran lunga i più utilizzati in ambito topografico, sia per la facilità di realizzazione, sia per la rapidità delle operazioni in campo, sia per la grande diffusione di infrastrutture a supporto sul territorio (le reti di stazioni permanenti per la distribuzione di correzioni differenziali).
La diffusione più che ventennale di questo tipo di tecnologia ha portato molti tecnici e operatori del settore a muoversi in campo con un solo ricevitore e ad acquistare ricevitori singoli potendo comunque essere autonomi per le attività di posizionamento. Al di là delle considerazioni strettamente legate alla tecnologia GNSS, vi è da considerare che è necessario avere una connessione dati in tempo reale che abilita la ricezione delle correzioni differenziali in tempo reale. Tipicamente, quindi, gli strumenti sono equipaggiati con un modem interno che richiede la presenza di una SIM.
La connettività dati
Vediamo, innanzitutto, quali sono le caratteristiche del tipo di connettività, proprio per capire quando è opportuno trovare altre soluzioni. Le correzioni differenziali che devono essere trasmesse sono un tipo di dato piuttosto leggero, alcuni Bps. Non è necessario, quindi, avere una connessione dati particolarmente performante, da un punto di vista della banda a disposizione. Ciò che, invece, diventa importante per qualificare la “bontà” della connessione dati è la continuità e la latenza con cui le correzioni arrivano al rover. Non è, infatti, tanto importante che passi un grande volume di dati, ma è importante che i pochi dati passino con continuità e con costanza. Non è opportuno, perciò, avere una connessione che presenti numerose interruzioni, anche irregolari. Sul controller del ricevitore, tale comportamento è evidenziato dal parametro di latenza, che generalmente indica il numero di secondi intercorso tra l’istante attuale e l’ultima correzione differenziale ricevuta. Tale valore deve essere sempre piuttosto basso, oscillando tra 0 e 1 quando le correzioni arrivano con continuità. Il valore aumenta e tende a crescere ogni secondo quando vi sono problemi di connessione e le correzioni ritardano.

Quali soluzioni
Sistema Base-Rover
La prima ipotesi, quando si hanno problemi di connettività dati, è valutare l’utilizzo di un rilievo RTK con una propria coppia di ricevitori base – rover (Fig.1) .
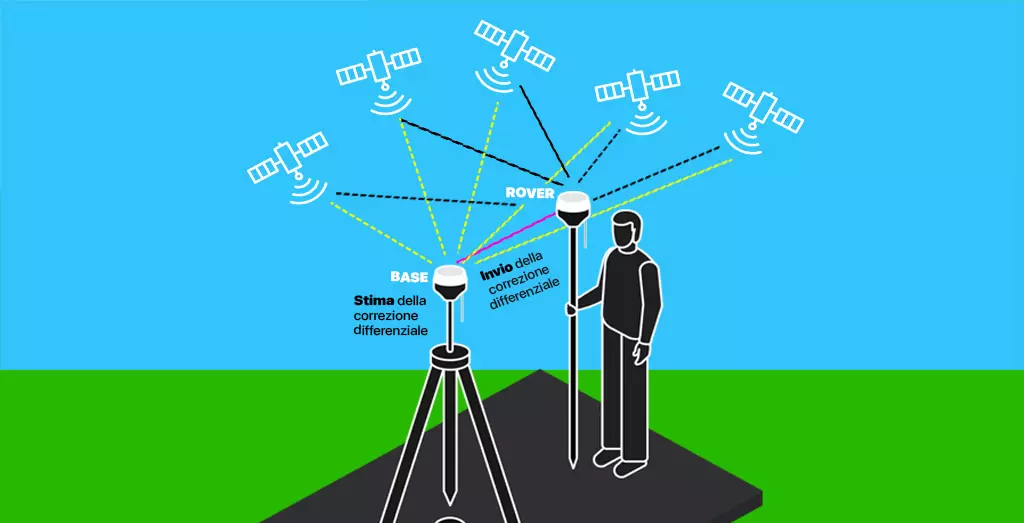
Fig. 1 – Correzioni base – rover
In questo caso, la connessione tra base e rover avviene mediante tecnologie differenti, tipicamente connessione radio punto a punto, che evidentemente supera i problemi di copertura telefonica per la connessione ad un server remoto. Per poter effettuare un rilievo di questo tipo, occorre intanto, ovviamente, avere a disposizione una coppia di ricevitori abilitata al collegamento in tempo reale. Detto ciò, è opportuno fare alcune considerazioni riguardo alla base.

Rilievo RTK: La stazione base ha una duplice funzione
- generare le correzioni differenziali
- materializzare il sistema di riferimento
Scopri le caratteristiche del GNSS Emlid Reach RS2+
Per il primo punto, occorre che la stazione base sia collocata, quanto più possibile, in una zona favorevole al rilievo, alla visibilità satellitare, alla ricezione di segnali puliti. Tale stazione, infatti, deve calcolare le proprie coordinate e, successivamente, proprio per differenza rispetto a quelle coordinate calcolate, stimare le correzioni differenziali. E’ chiaro, quindi, che tali coordinate debbano essere stimate con grande cura.
Riguardo al secondo punto, le coordinate della base sono quelle che determinano il sistema di riferimento della rete locale. Vi sono due possibilità per la definizione di tali coordinate. O vengono calcolate dal ricevitore o vengono inserite dall’operatore.
Nel primo caso, occorre che il ricevitore stesso stazioni per lungo tempo sul punto. Dipende molto dalle precisioni che si ricercano, si va da alcune decine di minuti ad alcune ore. Nel secondo caso, occorre che le coordinate del punto siano note a priori; ciò può avvenire se la base è stata posizionata su un punto già battuto o materializzato in precedenza, oppure se la si è rilevata direttamente in campo (con stazione totale, con un GNSS in PP). In tutti i casi, sia la precisione con cui sono determinate, sia il sistema di riferimento in cui sono espresse, verranno “riportati” anche alle coordinate del rover.
Concretamente, se le coordinate della base vengono calcolate con la precisione di + o – 1 metro, non si potrà evidentemente pretendere che le coordinate del rover vengano stimate con precisione centimetrica.
Rilievo in post-processing
Qualora non si abbia a disposizione la strumentazione per poter realizzare un rilievo base rover in RTK, l’alternativa possibile è quella del rilievo base rover in post processing. Operativamente, significa raccogliere in campo una certa quantità di dati grezzi da post elaborare in ufficio.
In questo caso, i fattori in gioco sono diversi, ma certamente l’impatto più importante ed evidente per l’utente è quello sui tempi di rilievo. Infatti, come noto una acquisizione di dati grezzi da post elaborare deve durare intervalli, variabili a seconda di precisioni, tipo di ricevitore e distanza dalla base, ma comunque imparagonabili rispetto ad un rilievo RTK. Si tratta, quindi, di una strada percorribile solo nel caso in cui i punti da rilevare con questa tecnica siano un numero relativamente piccolo, altrimenti probabilmente il rilievo diventa impraticabile.
GNSS: Quali le attenzioni da avere?
Intanto, individuare la disponibilità, nei pressi del punto da rilevare, di una stazione base che metta a disposizione i dati grezzi. Quanto questa base deve essere vicina?
Ovviamente, le condizioni saranno migliori quanto più la base è vicina, però possiamo spingerci fino a qualche kilometro, indicativamente fino ai 10. Oltre questa distanza, la baseline diventa più complessa da elaborare per fissare le ambiguità ad intero. (Fig.2)
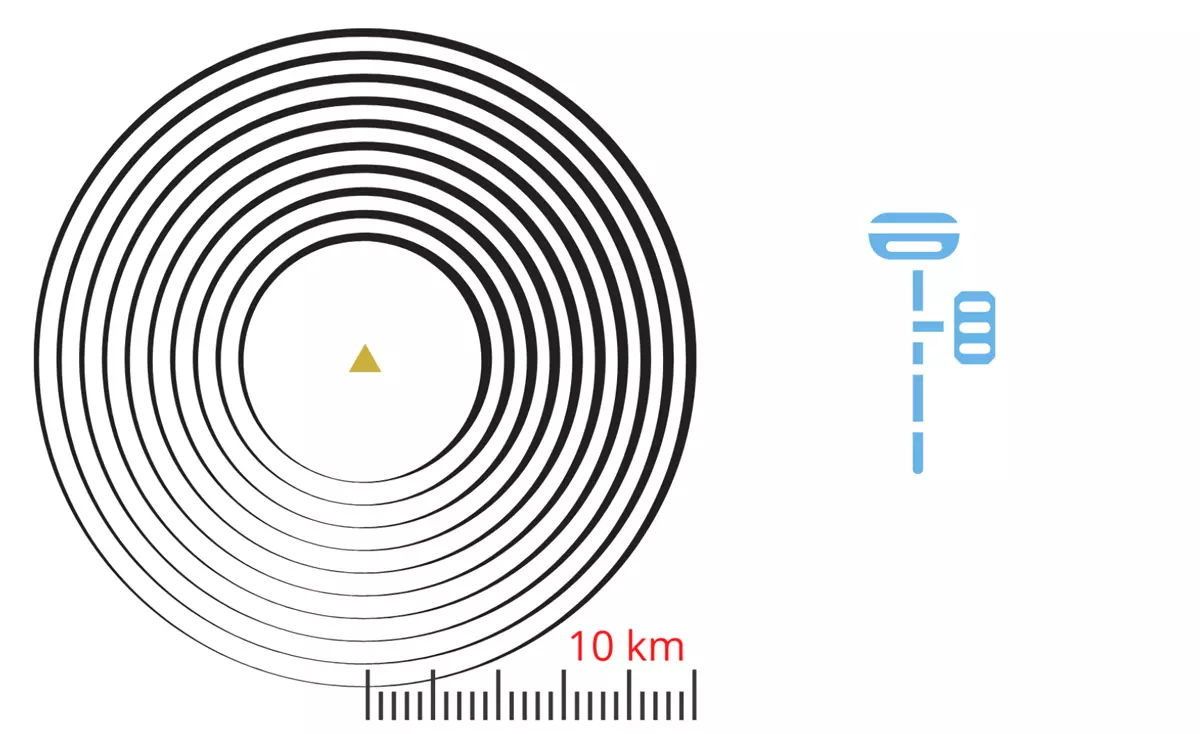
Fig. 2 – Baseline superiore ai 10 km, per cui è consigliabile utilizzare un rinex virtuale
Poi, certo, vi è da considerare che le contromisure vi sono: ad esempio, allungando la sessione di misura. Quando siamo costretti ad utilizzare baseline molto lunghe, si può e si deve considerare di fare sessioni lunghe, dall’ora in su. Questo non è sempre possibile per questioni logistiche e organizzative. Perciò, a parità di precisioni attese, si può tentare di ridurre la lunghezza della baseline, per poter contenere il rilievo statico in un intervallo di tempo ridotto (alcune decine di minuti).
La baseline può essere ridotta essenzialmente in due modi:
-
utilizzando un proprio ricevitore come base. Non è necessaria una connessione in tempo reale, come descritto sopra. E’ sufficiente che tale ricevitore sia acceso e registri i dati grezzi nello stesso intervallo di tempo in cui sta registrando anche il rover;
-
utilizzando un rinex virtuale. Di questo, si è parlato in un ebook, più nel dettaglio. In ogni caso, brevemente, si tratta di un rinex creato virtualmente da un servizio di reti di stazioni permanenti. E’ necessario, quindi, essere all’interno di un’area coperta da tale tipo di servizio, e si può creare e scaricare un file rinex in una posizione qualsiasi all’interno di tale area, senza dovere per forza utilizzare i dati delle singole stazioni fisiche.
Scarica l’ebook gratuito “I Rinex Virtuali – Cosa sono e come meglio utilizzarli”
Conclusioni
Pur avendo presente come l’approccio del rilievo in NRTK sia largamente più diffuso, vi sono delle condizioni che lo rendono impraticabile.
È importante sapere quali siano le contromisure da mettere in atto.
In altre parole, è importante sapere quali siano le modalità di rilievo alternative, quali le accortezze da avere e quali le strumentazioni da utilizzare.
Di fatto, le alternative sono di due tipi: o un rilievo in real time, ma utilizzando strumentazione propria, o un rilievo in post processing!